Dieser Artikel befasst sich mit Koalgebren über Körpern. Für Koalgebren über Komonaden siehe dort.
Eine Koalgebra ist ein Vektorraum, der die zu einer Algebra duale Struktur besitzt. Das heißt anstelle einer Multiplikation, die zwei Elemente auf ihr Produkt abbildet, gibt es eine Komultiplikation, die ein Element auf ein Tensorprodukt abbildet, und anstelle eines neutralen Elements, das die Einbettung des Grundkörpers in die Algebra ermöglicht, gibt es eine Abbildung aus der Koalgebra in den Grundkörper, die Koeins genannt wird.
Definition
Eine Koalgebra über einem Körper  ist ein -Vektorraum
ist ein -Vektorraum  mit Vektorraumhomomorphismen
mit Vektorraumhomomorphismen  , genannt Komultiplikation, Koprodukt oder auch Diagonale, und
, genannt Komultiplikation, Koprodukt oder auch Diagonale, und  , genannt Koeins, so dass
, genannt Koeins, so dass
 (Koassoziativität)
(Koassoziativität) (Koeins)
(Koeins)
Ein Koalgebrahomomorphismus zwischen zwei Koalgebren C und D ist ein Vektorraumhomomorphismus  mit
mit
 und
und  .
.
Beispiel
Sei  die kanonische Basis von
die kanonische Basis von  . Man kann auf eine Koalgebra-Struktur mittels
. Man kann auf eine Koalgebra-Struktur mittels

und

definieren.
 ist koassoziativ, da
ist koassoziativ, da
 ,
,
und  ist Koeins, da
ist Koeins, da
 .
.
Die Elemente von  sind Tensoren zweiter Stufe und können daher als Matrizen dargestellt werden. Die Komultiplikation ist dann
sind Tensoren zweiter Stufe und können daher als Matrizen dargestellt werden. Die Komultiplikation ist dann
 .
.
Dualität
Die Multiplikation  einer (unitären assoziativen) Algebra
einer (unitären assoziativen) Algebra  ist bilinear, und aufgrund der Universellen Eigenschaft des Tensorprodukts kann sie als Abbildung von
ist bilinear, und aufgrund der Universellen Eigenschaft des Tensorprodukts kann sie als Abbildung von  nach aufgefasst werden. Die Multiplikation ist genau dann assoziativ, wenn das folgende Diagramm kommutiert.
nach aufgefasst werden. Die Multiplikation ist genau dann assoziativ, wenn das folgende Diagramm kommutiert.

Eine Algebra besitzt genau dann ein neutrales Element, wenn es einen Vektorraumhomomorphismus  gibt, so dass das folgende Diagramm kommutiert:
gibt, so dass das folgende Diagramm kommutiert:

In diesem Fall gilt  .
.
Eine Koalgebra ist eine Algebra in der zu den Vektorräumen  dualen Kategorie
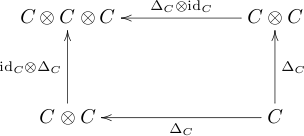
dualen Kategorie  . Das heißt, anstelle der Multiplikation gibt es eine Abbildung
. Das heißt, anstelle der Multiplikation gibt es eine Abbildung  , so dass das folgende duale Diagramm kommutiert:
, so dass das folgende duale Diagramm kommutiert:
Und anstelle eines neutralen Elements gibt es eine Abbildung , so dass das folgende duale Diagramm kommutiert:

Sweedlernotation
Über das Koprodukt  eines Elements
eines Elements  ist im Allgemeinen nur bekannt, dass es in
ist im Allgemeinen nur bekannt, dass es in  liegt und sich folglich als
liegt und sich folglich als

darstellen lässt. In der Sweedler-Notation (nach Moss Sweedler) wird dies abgekürzt, indem man symbolisch

schreibt. In summenloser Sweedler-Notation verzichtet man sogar auf das Summensymbol und schreibt

Es ist dabei wichtig zu beachten, dass diese Schreibweise nach wie vor eine Summe bezeichnet. Die Symbole  und
und  sind für sich allein bedeutungslos und stehen nicht für bestimmte Elemente aus , denn die Darstellung von
sind für sich allein bedeutungslos und stehen nicht für bestimmte Elemente aus , denn die Darstellung von  ist nicht eindeutig. Bei Rechnungen in der Sweedlernotation liest man die
ist nicht eindeutig. Bei Rechnungen in der Sweedlernotation liest man die  am besten als "geeignete und für diese Rechnung fest gewählte" Elemente.
am besten als "geeignete und für diese Rechnung fest gewählte" Elemente.
Diese Schreibweise ermöglicht es, die Komposition von  mit anderen Funktionen als
mit anderen Funktionen als

zu schreiben.
In summenloser Sweedler-Notation ist  genau dann Koeins, wenn
genau dann Koeins, wenn
 .
.
Das Koprodukt ist genau dann koassoziativ, wenn
 .
.
Dieses Element wird in Sweedler-Notation symbolisch als

und summenlos als

geschrieben.
Durch erneutes Anwenden von entstehen längere Tensorprodukte, die analog geschrieben werden. Dabei muss man die „Indizes“ der hinteren Elemente gegebenenfalls erhöhen:
 .
.
Durch Anwenden von verkürzen sich die Tensorprodukte, die „Indizes“ der hinteren Elemente werden entsprechend angepasst:
 .
.
Literatur
- Christian Kassel: Quantum Groups In: Graduate Texts in Mathematics. Springer-Verlag, ISBN 0-387-94370-6.











