Mit trigonometrischen Funktionen oder auch Winkelfunktionen (seltener: Kreisfunktionen oder goniometrische Funktionen) bezeichnet man rechnerische Zusammenhänge zwischen Winkel und Seitenverhältnissen (ursprünglich in rechtwinkligen Dreiecken). Tabellen mit Verhältniswerten für bestimmte Winkel ermöglichen Berechnungen bei Vermessungsaufgaben, die Winkel und Seitenlängen in Dreiecken nutzen. Die trigonometrischen Funktionen sind außerdem die grundlegenden Funktionen zur Beschreibung periodischer Vorgänge in den Naturwissenschaften.
Inhaltsverzeichnis
1Übersicht
2Definition
3Beziehungen zwischen den Funktionen
4Ungleichungen zwischen den Funktionen
5Anwendung
6Umkehrung
7Siehe auch
8Weblinks
9Einzelnachweise
Übersicht
Die Animation zeigt die Beziehung zwischen dem Einheitskreis und der Sinus- sowie der KosinusfunktionAm Einheitskreis definierbare trigonometrische FunktionenDie Funktionsgraphen aller trigonometrischen Funktionen
Die elementaren trigonometrischen Funktionen sind:
die Sinusfunktion (abgekürzt: sin)
die Kosinusfunktion (abgekürzt: cos)
die Tangensfunktion (abgekürzt: tan oder tg)
sowie deren Kehrwerte:
Kosekansfunktion (Kehrwert des Sinus: csc)
Sekansfunktion (Kehrwert des Kosinus: sec)
Kotangensfunktion (Kehrwert des Tangens: cot)
Zwischen diesen Funktionen bestehen enge Zusammenhänge. Genau genommen würde bereits eine der Funktionen ausreichen, um beliebige trigonometrische Probleme lösen zu können. Die Verwendung mehrerer verschiedener Funktionen ermöglicht jedoch eine Vereinfachung der Rechnungen und Formeln.
Die Kotangensfunktion wird in Tabellen mit Funktionswerten von trigonometrischen Funktionen gerne genutzt, da man cot(x) zusammen mit der Tangensfunktion tabellieren kann. Insofern ist die Bedeutung von cot(x) etwas größer als die von sec(x) und csc(x).
Es gibt weitere – heute eher unübliche – Funktionen, wie z. B. sinus versus (versin), cosinus versus (coversin), exsecant (exsec) und excosecant (excsc).
Definition
Ursprünglich sind die Winkelfunktionen als Seitenverhältnisse in rechtwinkligen Dreiecken und daher nur für Winkel von 0 bis 90 Grad definiert:
Diese Definition ist unabhängig von der Wahl des rechtwinkligen Dreiecks, das zur Berechnung verwendet wird. In jedem rechtwinkligen Dreieck mit gleichem Winkel ergeben diese Verhältnisse den gleichen Wert. Dies lässt sich z. B. mit den Strahlensätzen beweisen.
Aus diesen Beziehungen folgt unmittelbar die Beziehung:
Die Ankathete des Winkels ist gleichzeitig die Gegenkathete des anderen spitzen Winkels des rechtwinkligen Dreiecks; da die Winkelsumme im Dreieck 180° beträgt, und der rechte Winkel 90° zu dieser Summe beiträgt, ist dieser Winkel und daher
Die trigonometrischen Funktionen am Einheitskreis:
Die Winkelfunktionen können aber als Sekanten- und Tangentenabschnitte am Einheitskreis auch auf größere Winkel erweitert werden. Vom Schnittpunkt des einen Winkelschenkels mit dem Einheitskreis werden die Lote auf die beiden Koordinatenachsen gefällt und liefern Sinus und Kosinus des Winkels. Die Tangenten in den Punkten x = 1 bzw. y = 1 schneiden den Schenkel ebenfalls und liefern dann in der Projektion auf die Achsen den Tangens und den Kotangens. Dabei muss der Schenkel gegebenenfalls rückwärts verlängert werden, um einen Schnittpunkt zu erzielen. Auf diese Weise können jedem Winkel von 0 bis 360 Grad Werte der Winkelfunktionen zugeordnet werden, die nun freilich auch negativ werden können (siehe Abbildung). Die oben angegebenen Beziehungen gelten dabei weiterhin.
In der Analysis werden Sinus und Kosinus in der Regel über Potenzreihen definiert, wobei der Winkel im Bogenmaß angegeben wird. Näheres siehe in den Artikeln Sinus und Kosinus sowie Tangens.
Beziehungen zwischen den Funktionen
Die Vorzeichen der trigonometrischen Funktionen in Abhängigkeit vom Quadranten gibt die folgende Tabelle an:
Quadrant
sin und csc
cos und sec
tan und cot
I
+
+
+
II
+
−
−
III
−
−
+
IV
−
+
−
Der Betrag wird wie folgt umgerechnet:
sin
cos
tan
cot
sec
csc
sin(x)
cos(x)
tan(x)
cot(x)
sec(x)
csc(x)
Wenn das verwendet wird, ist zu beachten, dass
für oder
für oder
für oder
für oder
für oder
für oder
für oder
für oder
für oder
für oder
für oder
für oder
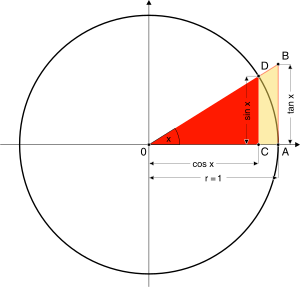
Ungleichungen zwischen den Funktionen
Grafische Veranschaulichung der Ungleichung von Aristarchos
In den nachfolgenden Ungleichungen, die auf den griechischen Astronomen und MathematikerAristarchos von Samos zurückgehen, werden Verhältnisse zwischen den Argumenten und den Funktionswerten trigonometrischer Funktionen miteinander verglichen. Sie lautet:
Aus der abgebildeten Figur resultieren der Beweisansätze
und
.
Dividiert man die erste dieser beiden letzten Ungleichungen durch und die zweite durch , so erhält man durch Zusammenführung der so umgeformten Ungleichungen
In manchen Situationen werden die trigonometrischen Winkelfunktionen benötigt, um aus Seitenverhältnissen Winkel zu berechnen. Dazu werden die Arkusfunktionen oder inverse Winkelfunktionen arcsin, arccos, arctan und arccot – die Umkehrfunktionen zu den trigonometrischen Funktionen – verwendet. Auf Taschenrechnern sind sie häufig mit sin−1 usw. bezeichnet. Das stimmt mit der Schreibweise für die Umkehrfunktion von f überein (auch wenn die Arkusfunktionen das genau genommen nicht sind), kollidiert allerdings mit der ebenso üblichen Konvention, für zu schreiben.
Die Arkusfunktionen werden verwendet, um zu einem Seitenverhältnis den Winkel zu berechnen. Wegen der Symmetrie der trigonometrischen Funktionen ist von Fall zu Fall zu klären, in welchem Quadrant der gesuchte Winkel liegt.
Commons: Plots Trigonometrischer Funktionen – Album mit Bildern, Videos und Audiodateien
Interaktive Darstellung der trigonometrischen Funktionen am Einheitskreis. In: GeoGebra. Abgerufen am 17. Mai 2023
Inverse Winkelfunktionen
Einzelnachweise
↑Roger B. Nelsen: Beweise ohne Worte, Deutschsprachige Ausgabe herausgegeben von Nicola Oswald, Springer Spektrum, Springer-Verlag BerlinHeidelberg 2016, ISBN 978-3-662-50330-0, Seite 146