Monotone cubic interpolation
Variant of cubic interpolation that preserves monotonicity
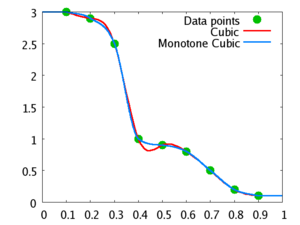
In the mathematical field of numerical analysis, monotone cubic interpolation is a variant of cubic interpolation that preserves monotonicity of the data set being interpolated.
Monotonicity is preserved by linear interpolation but not guaranteed by cubic interpolation.
Monotone cubic Hermite interpolation
Monotone interpolation can be accomplished using cubic Hermite spline with the tangents modified to ensure the monotonicity of the resulting Hermite spline.

An algorithm is also available for monotone quintic Hermite interpolation.
Interpolant selection
There are several ways of selecting interpolating tangents for each data point. This section will outline the use of the Fritsch–Carlson method. Note that only one pass of the algorithm is required.
Let the data points be indexed in sorted order for .


- Compute the slopes of the secant lines between successive points:
for . - These assignments are provisional, and may be superseded in the remaining steps. Initialize the tangents at every interior data point as the average of the secants,
for .
For the endpoints, use one-sided differences:
If and have opposite signs, set ..
- For , where ever (where ever two successive are equal),
set as the spline connecting these points must be flat to preserve monotonicity.
Ignore steps 4 and 5 for those . - Let
If either or is negative, then the input data points are not strictly monotone, and is a local extremum. In such cases, piecewise monotone curves can still be generated by choosing if or if , although strict monotonicity is not possible globally..
- To prevent overshoot and ensure monotonicity, at least one of the following three conditions must be met:




















- (a) the function
, or
- (b) , or
- (c) .
- Only condition (a) is sufficient to ensure strict monotonicity: must be positive.
- One simple way to satisfy this constraint is to restrict the vector to a circle of radius 3. That is, if , then set
and rescale the tangents via,
.
- Alternatively it is sufficient to restrict and . To accomplish this if , then set .
- (a) the function












Cubic interpolation
After the preprocessing above, evaluation of the interpolated spline is equivalent to cubic Hermite spline, using the data , , and for .



To evaluate at , find the index in the sequence where , lies between , and , that is: . Calculate





then the interpolated value is

where are the basis functions for the cubic Hermite spline.

Example implementation
The following JavaScript implementation takes a data set and produces a monotone cubic spline interpolant function:
/* * Monotone cubic spline interpolation * Usage example listed at bottom; this is a fully-functional package. For * example, this can be executed either at sites like * https://www.programiz.com/javascript/online-compiler/ * or using nodeJS. */ function DEBUG(s) { /* Uncomment the following to enable verbose output of the solver: */ //console.log(s); } var j = 0; var createInterpolant = function(xs, ys) { var i, length = xs.length; // Deal with length issues if (length != ys.length) { throw 'Need an equal count of xs and ys.'; } if (length === 0) { return function(x) { return 0; }; } if (length === 1) { // Impl: Precomputing the result prevents problems if ys is mutated later and allows garbage collection of ys // Impl: Unary plus properly converts values to numbers var result = +ys[0]; return function(x) { return result; }; } // Rearrange xs and ys so that xs is sorted var indexes = []; for (i = 0; i < length; i++) { indexes.push(i); } indexes.sort(function(a, b) { return xs[a] < xs[b] ? -1 : 1; }); var oldXs = xs, oldYs = ys; // Impl: Creating new arrays also prevents problems if the input arrays are mutated later xs = []; ys = []; // Impl: Unary plus properly converts values to numbers for (i = 0; i < length; i++) { xs.push(+oldXs[indexes[i]]); ys.push(+oldYs[indexes[i]]); } DEBUG("debug: xs = [ " + xs + " ]") DEBUG("debug: ys = [ " + ys + " ]") // Get consecutive differences and slopes var dys = [], dxs = [], ms = []; for (i = 0; i < length - 1; i++) { var dx = xs[i + 1] - xs[i], dy = ys[i + 1] - ys[i]; dxs.push(dx); dys.push(dy); ms.push(dy/dx); } // Get degree-1 coefficients var c1s = [ms[0]]; for (i = 0; i < dxs.length - 1; i++) { var m = ms[i], mNext = ms[i + 1]; if (m*mNext <= 0) { c1s.push(0); } else { var dx_ = dxs[i], dxNext = dxs[i + 1], common = dx_ + dxNext; c1s.push(3*common/((common + dxNext)/m + (common + dx_)/mNext)); } } c1s.push(ms[ms.length - 1]); DEBUG("debug: dxs = [ " + dxs + " ]") DEBUG("debug: ms = [ " + ms + " ]") DEBUG("debug: c1s.length = " + c1s.length) DEBUG("debug: c1s = [ " + c1s + " ]") // Get degree-2 and degree-3 coefficients var c2s = [], c3s = []; for (i = 0; i < c1s.length - 1; i++) { var c1 = c1s[i]; var m_ = ms[i]; var invDx = 1/dxs[i]; var common_ = c1 + c1s[i + 1] - m_ - m_; DEBUG("debug: " + i + ". c1 = " + c1); DEBUG("debug: " + i + ". m_ = " + m_); DEBUG("debug: " + i + ". invDx = " + invDx); DEBUG("debug: " + i + ". common_ = " + common_); c2s.push((m_ - c1 - common_)*invDx); c3s.push(common_*invDx*invDx); } DEBUG("debug: c2s = [ " + c2s + " ]") DEBUG("debug: c3s = [ " + c3s + " ]") // Return interpolant function return function(x) { // The rightmost point in the dataset should give an exact result var i = xs.length - 1; //if (x == xs[i]) { return ys[i]; } // Search for the interval x is in, returning the corresponding y if x is one of the original xs var low = 0, mid, high = c3s.length - 1, rval, dval; while (low <= high) { mid = Math.floor(0.5*(low + high)); var xHere = xs[mid]; if (xHere < x) { low = mid + 1; } else if (xHere > x) { high = mid - 1; } else { j++; i = mid; var diff = x - xs[i]; rval = ys[i] + diff * (c1s[i] + diff * (c2s[i] + diff * c3s[i])); dval = c1s[i] + diff * (2*c2s[i] + diff * 3*c3s[i]); DEBUG("debug: " + j + ". x = " + x + ". i = " + i + ", diff = " + diff + ", rval = " + rval + ", dval = " + dval); return [ rval, dval ]; } } i = Math.max(0, high); // Interpolate var diff = x - xs[i]; j++; rval = ys[i] + diff * (c1s[i] + diff * (c2s[i] + diff * c3s[i])); dval = c1s[i] + diff * (2*c2s[i] + diff * 3*c3s[i]); DEBUG("debug: " + j + ". x = " + x + ". i = " + i + ", diff = " + diff + ", rval = " + rval + ", dval = " + dval); return [ rval, dval ]; }; }; /* Usage example below will approximate x^2 for 0 <= x <= 4. Command line usage example (requires installation of nodejs): node monotone-cubic-spline.js */ var X = [0, 1, 2, 3, 4]; var F = [0, 1, 4, 9, 16]; var f = createInterpolant(X,F); var N = X.length; console.log("# BLOCK 0 :: Data for monotone-cubic-spline.js"); console.log("X" + "\t" + "F"); for (var i = 0; i < N; i += 1) { console.log(F[i] + '\t' + X[i]); } console.log(" "); console.log(" "); console.log("# BLOCK 1 :: Interpolated data for monotone-cubic-spline.js"); console.log(" x " + "\t\t" + " P(x) " + "\t\t" + " dP(x)/dx "); var message = ''; var M = 25; for (var i = 0; i <= M; i += 1) { var x = X[0] + (X[N-1]-X[0])*i/M; var rvals = f(x); var P = rvals[0]; var D = rvals[1]; message += x.toPrecision(15) + '\t' + P.toPrecision(15) + '\t' + D.toPrecision(15) + '\n'; } console.log(message);
References
- Fritsch, F. N.; Carlson, R. E. (1980). "Monotone Piecewise Cubic Interpolation". SIAM Journal on Numerical Analysis. 17 (2). SIAM: 238–246. doi:10.1137/0717021.
- Dougherty, R.L.; Edelman, A.; Hyman, J.M. (April 1989). "Positivity-, monotonicity-, or convexity-preserving cubic and quintic Hermite interpolation". Mathematics of Computation. 52 (186): 471–494. doi:10.2307/2008477.
External links
- GPLv2 licensed C++ implementation: MonotCubicInterpolator.cpp MonotCubicInterpolator.hpp










