En mathématiques, et plus précisément en géométrie plane, le théorème de Morley, découvert par Frank Morley en 1898, affirme que les intersections des trissectrices des angles d'un triangle forment un triangle équilatéral.
Le triangle équilatéral ainsi défini par le théorème de Morley s'appelle le « triangle de Morley » du triangle de départ.
Démonstrations
Il existe de nombreuses démonstrations de ce théorème. Ci-dessous sont présentées trois démonstrations : une n'utilisant que des propriétés de géométrie élémentaire, les deux autres travaillant sur la trigonométrie ou les complexes offrant l'avantage de fournir la dimension du triangle équilatéral[1].
Pour tous réels strictement positifs tels que est appelé « dipode de pointure » la figure constituée d'un triangle équilatéral direct auquel on adjoint deux triangles de sens direct et tels que les angles de sommets et aient pour mesure en radians a et b et les angles de sommets et aient pour mesure Par construction, deux dipodes de même pointure sont directement semblables.
De même est appelé « tripode de pointure », la figure constituée de trois dipodes de pointure de pointure et de pointure Par construction, deux tripodes de même pointure sont directement semblables.
Pour un tripode donné de pointure on construit ensuite le triangle direct tel que les angles de sommet et mesurent et On appelle le point de concours des bissectrices de ce triangle et on construit un triangle équilatéral direct symétrique par rapport à et tel que et appartiennent respectivement à et . On démontre alors que est un bipode de pointure Comme deux bipodes de même pointure sont directement semblables, les bipodes et sont semblables et confondus, et les demi-droites et sont les bissectrices intérieures des angles et En reprenant le même raisonnement sur puis , on démontre que les demi-droites , , , , et sont les trisectrices du triangle dont les angles aux sommets sont donc
Tout triangle direct d'angles est directement semblable au triangle construit à partir du tripode de pointure et ses trisectrices se coupent donc en formant un triangle équilatéral directement semblable au triangle .
Démonstration à l'aide de la trigonométrie
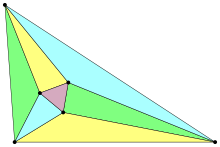
La loi des sinus détermine la longueur de la plupart des segments à partir des côtés du triangle et le théorème d'Al-Kashi permet de déterminer les autres, notamment les trois côtés PR, PQ et QR du triangle rouge — celui qui est censé être équilatéral.
On définit les angles , et tels que :
Puisque dans tout triangle on a :
le changement de variable ci-dessus donne :
De plus, pour simplifier les calculs, on adopte une unité de longueur telle que le rayon du cercle circonscrit au triangle est 1. On a alors :
AB = 2 sin(3c),
BC = 2 sin(3a),
AC = 2 sin(3b).
Dans le triangle BPC, d'après la loi des sinus, on a :
On peut développer sin(3a) :
ce qui permet de simplifier l'expression de BP :
On obtiendrait de même :
En appliquant alors le théorème d'Al-Kashi, qui s'écrit PR2 = BP2 + BR2 – 2 BP BR cos(b), on obtient :
Or
Il existe donc un triangle ayant pour angles et dont le rayon du cercle circonscrit est 1. Si on lui applique le théorème d'Al-Kashi, on a :
donc
On obtiendrait de même
ce qui prouve que PR = PQ = QR. Le triangle PQR est donc bien équilatéral.
Démonstration à l'aide des complexes
Cette démonstration est basée sur un article d'Alain Connes[3],[4],[5]. Elle utilise les nombres complexes et donne un calcul rapide de l'affixe des sommets du triangle équilatéral.
On se place dans le plan euclidien orienté qu'on pourra ultérieurement identifier au corps des complexes. On désigne par P, Q et R les trois intersections de trisectrices dont on veut montrer qu'elles forment un triangle équilatéral. En outre, on place les points P', Q' et R' symétriques de P, Q et R respectivement par rapport à BC, CA, 'AB (voir figure ci-contre). On note enfin comme précédemment les angles .
Soient maintenant f, g, h les rotations de centres respectifs A, B, C et d'angles respectifs . On observe alors que :
(i) P (resp. Q, R) est le point fixe de (car il est centre de cette rotation) (resp. ).
En effet h transforme P en P' et g transforme P' en P. Il en est de même pour Q et R.
En effet la somme des angles des rotations composantes est 2π et on obtient donc une translation. Mais A est invariant puisque h3 (rotation de centre C et d'angle ) transforme A en A' symétrique de A par rapport à BC, g3 transforme A' en A et finalement f3 laisse A invariant. Par suite cette translation est l'application identité.
Ainsi, on peut désormais travailler dans le corps des complexes en conservant les notations que nous avons introduites. On définit simplement les rotations f, g, h par
Ces trois égalités sont bien définies car le triangle n'est pas plat, donc aucun des angles ne vaut ±π.
On peut alors vérifier que , ce qui est une caractérisation classique du caractère équilatéral du triangle PQR.
Démonstration de
On développe , en utilisant que le complexe vérifie
Le coefficient de b1 dans l'expression ci-dessus est
.
Le coefficient de b2 est
.
Enfin, le coefficient de b3 est
.
Finalement,
.
Autres propriétés du triangle de Morley
Longueur des côtés
Chaque côté du triangle de Morley mesure :
où désignent les angles en A,B,C du triangle et où désigne le rayon du cercle circonscrit.
Orientation du triangle de Morley
Orientation par rapport au triangle de départ : le côté du triangle de Morley situé le plus près du sommet A fait avec le côté du triangle de départ un angle égal à .
Orientation par rapport à la deltoïde de Steiner : le triangle (équilatéral) formé par les points de rebroussement de la deltoïde de Steiner et le triangle (équilatéral) de Morley, ont leurs côtés parallèles.
Centres de Morley
On appelle centres de Morley deux centres du triangle points de Morley. Ils portent les nombres de Kimberling X356 (premier centre de Morley, le centre de gravité du triangle de Morley) et X357 (deuxième centre de Morley, premier centre de Morley–Taylor–Marr, ou point de concours des droites AP, BQ, CR)[6],[7].
Les coordonnées trilinéaires du deuxième centre de Morley sont
Historique
Après la découverte de ce théorème par Frank Morley à la fin du XIXe siècle, les collègues de ce dernier trouvaient le résultat si beau qu'ils lui ont donné le nom de « miracle de Morley ». Comme l'écrit Richard Francis : « Apparemment ignoré par les géomètres antérieurs ou hâtivement abandonné en raison d'incertitudes liées à la trisection et à la constructibilité, le problème n'apparut réellement qu'il y a un siècle. » Par ailleurs, même si Morley a proposé une solution au problème, la preuve rigoureuse du théorème a été plus tardive[8],[1].
Notes et références
↑ a et bJean-Pierre Boudine, L'appel des maths, t. 2, Cassini, p. 264-270
↑Jean Aymès, Ces problèmes qui font les mathématiques (la trisection de l'angle), Publication de l'A.P.M.E.P., no 70, 1988, p. 54.
↑(en) Alain Connes, « A new proof of Morley's theorem », Publ. Math. IHES, vol. S88, , p. 43-46 (lire en ligne).
↑Alain Connes, « Une nouvelle preuve du théorème de Morley »
↑Clifford Pickover (trad. de l'anglais), Le Beau Livre des Maths : De Pythagore à la 57e dimension, Paris, Dunod, , 527 p. (ISBN978-2-10-054640-4), p. 296
Lien externe
Théorème de Morley sur le site abracadabri (associé à Cabri Géomètre) ; on y verra décrits 18 triangles équilatéraux avec des sommets sur des trisectrices généralisées issues des 3 sommets du triangle et 36 triangles avec des sommets sur des trisectrices issues de 2 sommets du triangle.
(en) [vidéo] Mathologer, Math is Illuminati confirmed (PART 2): Morley's Miracle sur YouTube, une preuve géométrique animée du théorème de Morley, due à John Conway.




























![{\displaystyle [\mathrm {BW'} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7ae7c335f8b4a9a3d0926ab7ed3a24cbc79b7645)
![{\displaystyle [\mathrm {AW'} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/603b654b3a6bb85754968b9f3df3bb2d2904b23a)






![{\displaystyle [\mathrm {BC} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b79b8df981cccdb33d14502cd54f879ca764c661)
![{\displaystyle [\mathrm {CA} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/81d0280fbe0f88b364b66ac17d1d9d4731dcdebb)





















![{\displaystyle \mathrm {PR} ^{2}=64\sin ^{2}(a)\sin ^{2}(c)\left[\sin ^{2}\left({\tfrac {\pi }{3}}+a\right)+\sin ^{2}\left({\tfrac {\pi }{3}}+c\right)-2\sin \left({\tfrac {\pi }{3}}+a\right)\sin \left({\tfrac {\pi }{3}}+c\right)\cos(b)\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3b37e3a6aa8c418934c4c3782a66e07fe6de6789)































![{\displaystyle a_{3}(a_{1}-\mathrm {j} )[a_{2}-\mathrm {j} +\mathrm {j} ^{2}a_{2}(a_{3}-\mathrm {j} )]=a_{3}(a_{1}-\mathrm {j} )(-\mathrm {j} +1/a_{1})=-{\frac {\mathrm {j} a_{3}}{a_{1}}}(a_{1}^{2}+a_{1}+1)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/746c371baddceadf870535366f19b96780845a03)
![{\displaystyle a_{1}(a_{2}-\mathrm {j} )[a_{3}(a_{1}-\mathrm {j} )+\mathrm {j} (a_{3}-\mathrm {j} )]=\mathrm {j} a_{1}(a_{2}-\mathrm {j} )(-\mathrm {j} +1/a_{2})=-{\frac {\mathrm {j} ^{2}a_{1}}{a_{2}}}(a_{2}^{2}+a_{2}+1)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/79c06102875ee565d5f9476f8d31b74e9bcc9d18)
![{\displaystyle a_{2}(a_{3}-\mathrm {j} )[\mathrm {j} a_{1}(a_{2}-\mathrm {j} )+\mathrm {j} ^{2}(a_{1}-\mathrm {j} )]=\mathrm {j} ^{2}a_{2}(a_{3}-\mathrm {j} )(-\mathrm {j} +1/a_{3})=-{\frac {a_{2}}{a_{3}}}(a_{3}^{2}+a_{3}+1)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/adeddfb1ed04632690804ac0da387153d41959c7)
![{\displaystyle {\begin{aligned}(R+j\mathrm {P} +j^{2}\mathrm {Q} )(a_{1}-j)(a_{2}-j)(a_{3}-j)&\\=&-{\frac {1}{ja_{1}^{2}a_{2}}}[(a_{1}^{2}+a_{1}+1)b_{1}+a_{1}^{3}(a_{2}^{2}+a_{2}+1)b_{2}+(a_{1}a_{2})^{3}(a_{3}^{2}+a_{3}+1)b_{3}]=0\quad {\text{ (cf. (iii))}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5c8991fb842aad0e9803fde0a129a4791d2ae984)










 Portail de la géométrie
Portail de la géométrie 






