A matematikában az ortogonális koordináta-rendszerekben az egyes koordinátákhoz tartozó koordinátafelületek ortogonálisan (derékszögűen) metszik egymást. Egy adott qk (a felső index most nem hatványozás, hanem Einstein-féle notáció) koordinátához tartozó koordinátavonal, koordinátafelület vagy koordináta-hiperfelület, ahol a qk konstans. Például az (x, y, z) Descartes-féle koordináta-rendszer ortogonális, hiszen koordinátafelületei, az xy, az yz és az xzkoordinátasíkok egymásra merőlegesek. Az ortogonális koordináta-rendszerek a görbevonalú koordináta-rendszerek speciális esetei.
Motiváció
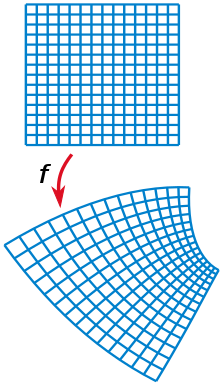
Téglalaprács konform leképezése. Jegyezzük meg, hogy a derékszögűség megmarad
Míg a vektorműveletek és a fizikai törvények általában legkönnyebben a Descartes-koordinátákkal írhatók le, gyakran más koordináta-rendszereket használnak különböző problémák leírására, például peremérték problémák, amelyek különböző alkalmazásokból származnak, mint kvantummechanika, áramlástan, elektrodinamika, plazmafizika, hő és anyagok diffúziója.
A nem Descartes-féle koordináta-rendszereknek az az előnye, hogy az adott probléma szimmetriájához képest választhatók. Például egy robbanás nyomáshulláma legerősebben a nyomás középpontjától kifelé terjed, így gömbi koordinátákban a probléma majdhogynem egydimenzióssá válik. A nyomáshullám Descartes-féle koordinátarendszerben a helytől függ. Egy másik probléma egy gyűrű alakban áramló folyadék: Descartes-féle koordináta-rendszerben parciális differenciálegyenlettel leírható, de hengerkoordináta-rendszerben egydimenzióssá válik, és parciális differenciálegyenlet helyett csak differenciálegyenletet kell megoldani.
Az ortogonális koordináta-rendszerek az egyszerűség miatt részesítik előnyben a nem ortogonális koordináta-rendszerekkel szemben. Például lehetővé teszik több probléma megoldását a változók szétválasztásával. A változók szétválasztása egy módszer ahhoz, hogy egy többváltozós differenciálegyenletből egyváltozós differenciálegyenlet-rendszert hozzanak létre, amelyek megoldhatók ismert függvények segítségével. Több egyenlet visszavezethető Laplace egyenletére vagy a Helmholtz-egyenletre. Laplace egyenlete szétválasztható 13 ismert ortogonális koordináta-rendszerben (a kivétel a toroid koordináta-rendszer), és a Helmholtz-egyenlet szétválasztható 11 ismert ortogonális koordináta-rendszerben.[1][2]
Egy további előny, hogy az ortogonális koordináta-rendszerek metrikus tenzora diagonális. Ez ekvivalens azzal, hogy az infinitezimális ds2 távolságnégyzet írható, mint a négyzetre emelt infinitezimális koordináta-elmozdulás skálázott összege:
ahol d a dimenzió, és a skálázási egyenletek (vagy skálázási tényezők):
egyenlő a metrikus tenzor átlós elemeinek négyzetgyökeivel, avagy a lokális bázisvektorok hosszával. Erről később még lesz szó. Ezeknek a hi skálázási tényezőknek a segítségével különböző differenciáloperátorok számolhatók át az új koordinátákra, mint a gradiens, a Laplace-operátor, a divergencia és a rotáció.
A kétdimenziós ortogonális koordináta-rendszerek generálásának egy egyszerű módja a Descartes-koordináta-rendszerre alkalmazott konform leképezés. Legyenek a Descartes-koordináták (x, y); ekkor a koordináták kölcsönösen egyértelműen megfeleltethetők a z = x + iy komplex számmal, ahol i a képzetes egység. Bármely w = f(z) holomorf függvény, melynek deriváltja különbözik a nullától, konform leképezést generál. Ha a kapott komplex számot úgy írjuk, mint w = u + iv, akkor a konstans u és v értékekhez tartozó görbék derékszögben metszik egymást, ahogy azt a konstans x és y koordinátagörbék is teszik.
A kétdimenziós ortogonális koordináta-rendszerek magasabb dimenziókra is kibővíthetők. Felvetítéssel hengerkoordinátákhoz jutunk, de meg is forgathatjuk a kétdimenziós koordináta-rendszert valamelyik szimmetriatengelye körül. Azonban vannak más ortogonális koordináta-rendszerek, mint például az ellipszoid koordináta-rendszer. Általánosabb rendszerekhez juthatunk, ha vesszük a szükséges felületeket, és ortogonális trajektóriáikat.
Bázisvektorok
Kovariáns bázis
Kétdimenziós ortogonális koordináták. Az ábra mutatja azokat a görbéket, melyek egy kivételével az összes többi rögzítésével kaphatók, bázisvektoraikkal. Jegyezzük meg, hogy a bázisvektoroknak nem kell egyenlő hosszúaknak lenniük: csak az ortogonalitás követelmény
A Descartes-féle koordináta-rendszerekben a bázisvektorok konstansok. Az általánosabb görbe vonalú koordináta-rendszerek esetén pontonként határozható meg helyi vektorbázis. Ezek általában nem konstansok: ez a görbe vonalú koordináta-rendszerek lényege, és így egy fontos fogalom. Ortogonális koordináta-rendszerek esetén ezek mind ortogonális bázisok, azaz
Ezek a bázisvektorok definíció szerint érintői azoknak a görbéknek, amelyek úgy kaphatók, hogy egy kivétellel rögzítjük a koordinátákat, és egy változhat:
ahol r egy pont, és qi az a koordináta, melyhez tartozó bázisvektort kivonatoljuk. Más szavakkal, a többi koordináta rögzítése mellett ezt a koordinátát paraméterként változtatjuk; a befutott görbét e paraméter mentén deriváljuk, és így kapjuk a koordinátához tartozó bázisvektort.
Jegyezzük meg, hogy a helyi bázis vektorai nem feltétlenül egyenlő hosszúságúak. Hosszaik megegyeznek a helyi skálázási tényezőkkel. Pontosabban, a skálázási tényező az helyi bázisvektor hossza. A skálázási tényezőket nevezik Lamé-együtthatóknak is, ami nem tévesztendő össze a Lamé-paraméterekkel.
A normalizált bázisvektorokat kalapos betűk jelölik, és a megfelelő hosszakkal leosztva kaphatók:
Egy vektormező megadható komponenseivel a bázisvektorokban, vagy a normalizált bázisvektorokban. Alkalmazáskban inkább a normalizált bázisvektorokat használják, hogy a mennyiségek könnyebben értelmezhetőek legyenek. A deriváltakban inkább a bázisvektorokat használják.
Kontravariáns bázis
A fent megadott helyi bázisok a kovariáns bázisok, hiszen hosszuk együtt változik a vektorokkal. A kontravariáns vektorok iránya ugyanaz, mint a kovariáns bázisvektoroké, de hosszuk annak reciproka. Azt mondják, hogy a két bázis reciproka egymásnak:
ami következik abból, hogy definíció szerint (a Kronecker-deltával). Jegyezzük meg, hogy:
Most három bázisunk is van a vektorok leírásához: az ei kovariáns bázis, az êi normalizált bázis és az ei kontravariáns bázis. Míg egy vektor objektív mennyiség, azaz független a koordináta-rendszertől, a vektor komponensei függenek a koordináta-rendszertől.
A zavar elkerülése érdekében egy x vektor koordinátái az ei bázisban xi, az ei bázisban xi:
Az indexek helyzete a komponensek számítási módját mutatja, ami nem tévesztendő össze a hatványozással. Jegyezzük meg még azt is, hogy a szumma szimbólumon belül, illetve a teljes bázisra kiterjedő összegzési tartományt gyakran mellőzik (Einstein-féle notáció):
Ezzel szemben nincs elterjedt jelölés a normalizált bázisban megadott vektorkomponensek számára; a cikkben alsó indexeket használunk, és megjegyezzük, hogy normalizált bázist használunk.
Vektoralgebra
A vektorok koordinátánként összeadhatók és kivonhatók, a Descartes-féle koordináta-rendszerhez hasonlóan. A többi vektorművelet végrehajtásához azonban további meggondolások szükségesek.
A következőkhöz megjegyezzük, hogy mindkét vektornak ugyanabban a helyi bázisban kell adva lennie. Mivel a különböző pontokhoz különböző bázisok tartoznak, azért ilyenkor figyelembe kell venni a különböző helyi bázisokat.
Skaláris szorzat
Descartes-féle koordináta-rendszerben a skaláris szorzat a megfelelő koordináták szorzatának az összege. Ortogonális koordinátákban két vektor, x és y skalárszorzata ugyanezt az alakot ölti a normalizált bázisban:
Ez annak a következménye, hogy a normalizált bázis ortonormált. Kovariáns vagy kontravariáns esetben:
Ez származtatható abból, hogy a vektorokat komponensekre bontjuk, normalizáljuk a bázisvektorokat, és vesszük a skaláris szorzatot. Például két dimenzióban:
Vektoriális szorzat
Descartes-koordinátákban két vektor vektoriális szorzata három dimenzióban van értelmezve:
A fenti képlet ortonormált bázisokban érvényes. Kovariáns és kontravariáns bázisokban a bázisokat normalizálni kell:
ami kifejtve:
A Levi-Civita tenzor lehetővé teszi a vektoriális szorzat tömör jelölését, ami leegyszerűsíti a vektoriális szorzat általánosítását nem ortogonális bázisokra és magasabb dimenziókra. A Levi-Civita tenzor tartalmaz nullától és egytől különböző elemeket, ha a skálázási tényezők nem mindegyike egyenlő eggyel.
Vektorkalkulus
Differenciálás
Tekintve egy pont infinitezimális elmozdulását, nyilvánvaló, hogy:
definíció szerint egy függvény gradiensének teljesítenie kell, hogy:
A szabály ugyanez, ha ƒ tenzor. Következik, hogy a nabla operátor:
és ez igaz marad görbe vonalú koordinátákban. A gradiens és a Laplace-operátor számítható a nabla operátor segítségével.
Alapképletek
Az êi normalizált bázisvektorokból és dr-ből a következők konstruálhatók:[3][4]
a Jacobi-determináns, melynek geometriai reprezentációja a dxdydz infinitezimális kocka térfogat-deformációja az ortogonális koordináta-rendszer infinitezimális görbült térfogatára.
Integrál
A fenti vonalelemmel egy F vektor egy útvonala menti vonalintegrál:
Egy konstanson tartott qk koordinátával leírt felület infinitezimális felszíneleme:
Hasonlóan, a térfogatelem:
ahol a nagy Π szimbólum szorzást jelöl ahhoz hasonlóan, ahogy egy nagy Σ összegzést jelöl. Jegyezzük meg, hogy a skálázási ténxyezők szorzata megegyezik a Jacobi-determinánssal.
Például egy F vektorfüggvény felületi integrálja egy q1 = konstans felület mentén három dimenzióban:
Jegyezzük meg, hogy F1/h1 az F felszínre normális komponense.
Differenciáloperátorok három dimenzióban
Mivel ezek az operátorok gyakoriak az alkalmazásokban, azért ebben a szakaszban a normalizált bázist használjuk: .
Az Levi-Civita-szimbólummal és a Jacobi-determinánssal, melyre , és az ismétlődő indexek összegzésének feltételezésével a fnti képletek kompaktabban is írhatók:
Megjegyezzük, hogy skalármező gradiense kifejezhető a J Jacobi-mátrixszal és a kannikus parciális deriváltakkal:
bázisváltással:
ahol a forgató és skálázó mátrixok:
Gyakoribb ortogonális koordináták
A szokásos Descartes-koordinátarendszer mellett még gyakran használnak több más koordináta-rendszert is.[4] Ezeket az alábbi táblázat tartalmazza. A tömörség kedvéért az egyes koordináták által befutott intervallumokat intervallumként jelöljük egyenlőtlenségek helyett.
Görbevonalú koordináták: q1, q2, q3)
Transformáció az (x, y, z) Descartes-koordinátákra
↑Mathematical Handbook of Formulas and Tables (3rd edition), S. Lipschutz, M.R. Spiegel, J. Liu, Schuam's Outline Series, 2009, ISBN 978-0-07-154855-7.
↑ abVector Analysis (2nd Edition), M.R. Spiegel, S. Lipschutz, D. Spellman, Schaum’s Outlines, McGraw Hill (USA), 2009, ISBN 978-0-07-161545-7
Fordítás
Ez a szócikk részben vagy egészben az Orthogonal coordinates című angol Wikipédia-szócikk ezen változatának fordításán alapul. Az eredeti cikk szerkesztőit annak laptörténete sorolja fel. Ez a jelzés csupán a megfogalmazás eredetét és a szerzői jogokat jelzi, nem szolgál a cikkben szereplő információk forrásmegjelöléseként.
Források
Korn GA and Korn TM. (1961) Mathematical Handbook for Scientists and Engineers, McGraw-Hill, pp. 164–182.
Morse and Feshbach (1953). „Methods of Theoretical Physics, Volume 1”, Kiadó: McGraw-Hill.
Margenau H. and Murphy GM. (1956) The Mathematics of Physics and Chemistry, 2nd. ed., Van Nostrand, pp. 172–192.
Leonid P. Lebedev and Michael J. Cloud (2003) Tensor Analysis, pp. 81 – 88.
Matematikaportál • összefoglaló, színes tartalomajánló lap
















![{\displaystyle {\begin{aligned}\mathbf {x} \cdot \mathbf {y} &=\left(x^{1}\mathbf {e} _{1}+x^{2}\mathbf {e} _{2}\right)\cdot \left(y_{1}\mathbf {e} ^{1}+y_{2}\mathbf {e} ^{2}\right)\\[10pt]&=\left(x^{1}h_{1}{\hat {\mathbf {e} }}_{1}+x^{2}h_{2}{\hat {\mathbf {e} }}_{2}\right)\cdot \left(y_{1}{\frac {{\hat {\mathbf {e} }}^{1}}{h_{1}}}+y_{2}{\frac {{\hat {\mathbf {e} }}^{2}}{h_{2}}}\right)=x^{1}y_{1}+x^{2}y_{2}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b967298ef8aa5d1b20f98c99698d74ed639bbcae)




















![{\displaystyle \nabla \cdot \mathbf {F} ={\frac {1}{h_{1}h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{1}}}\left(F_{1}h_{2}h_{3}\right)+{\frac {\partial }{\partial q^{2}}}\left(F_{2}h_{3}h_{1}\right)+{\frac {\partial }{\partial q^{3}}}\left(F_{3}h_{1}h_{2}\right)\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/507074e0312d74f218fab31eb2c8b8f5b1f4c006)
![{\displaystyle {\begin{aligned}\nabla \times \mathbf {F} &={\frac {{\hat {\mathbf {e} }}_{1}}{h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{2}}}\left(h_{3}F_{3}\right)-{\frac {\partial }{\partial q^{3}}}\left(h_{2}F_{2}\right)\right]+{\frac {{\hat {\mathbf {e} }}_{2}}{h_{3}h_{1}}}\left[{\frac {\partial }{\partial q^{3}}}\left(h_{1}F_{1}\right)-{\frac {\partial }{\partial q^{1}}}\left(h_{3}F_{3}\right)\right]\\[10pt]&+{\frac {{\hat {\mathbf {e} }}_{3}}{h_{1}h_{2}}}\left[{\frac {\partial }{\partial q^{1}}}\left(h_{2}F_{2}\right)-{\frac {\partial }{\partial q^{2}}}\left(h_{1}F_{1}\right)\right]={\frac {1}{h_{1}h_{2}h_{3}}}{\begin{vmatrix}h_{1}{\hat {\mathbf {e} }}_{1}&h_{2}{\hat {\mathbf {e} }}_{2}&h_{3}{\hat {\mathbf {e} }}_{3}\\{\dfrac {\partial }{\partial q^{1}}}&{\dfrac {\partial }{\partial q^{2}}}&{\dfrac {\partial }{\partial q^{3}}}\\h_{1}F_{1}&h_{2}F_{2}&h_{3}F_{3}\end{vmatrix}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6f0cf253355fd6c635882210ba8aea0ce0a2ed69)
![{\displaystyle \nabla ^{2}\phi ={\frac {1}{h_{1}h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{1}}}\left({\frac {h_{2}h_{3}}{h_{1}}}{\frac {\partial \phi }{\partial q^{1}}}\right)+{\frac {\partial }{\partial q^{2}}}\left({\frac {h_{3}h_{1}}{h_{2}}}{\frac {\partial \phi }{\partial q^{2}}}\right)+{\frac {\partial }{\partial q^{3}}}\left({\frac {h_{1}h_{2}}{h_{3}}}{\frac {\partial \phi }{\partial q^{3}}}\right)\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c36a46d097a001f5efcd7baeb71a704a4b7d12a7)






![{\displaystyle \mathbf {J} =\left[{\frac {\partial \phi }{\partial q^{1}}},{\frac {\partial \phi }{\partial q^{2}}},{\frac {\partial \phi }{\partial q^{3}}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2b3d1780fdf3a08972f06460f5741be18d7bd6fe)

![{\displaystyle \mathbf {R} =[\mathbf {e} _{1},\mathbf {e} _{2},\mathbf {e} _{3}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/28fd2e72b24c18b1b2b140ee915554865ec5c6a5)
![{\displaystyle \mathbf {S} =\mathrm {diag} ([h_{1}^{-1},h_{2}^{-1},h_{3}^{-1}]).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/974cf3b8344f1c1effd1f000b64a2ac21b104055)
![{\displaystyle (r,\theta ,\phi )\in [0,\infty )\times [0,\pi ]\times [0,2\pi )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/05f80374da8b4cc0a2a38db8d858474b585b0574)





















![{\displaystyle (\xi ,\eta ,\phi )\in [0,\infty )\times [0,\pi ]\times [0,2\pi )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/58c343b31aeed0f8843151e697f796a225a14491)


![{\displaystyle (\xi ,\eta ,\phi )\in [0,\infty )\times \left[-{\frac {\pi }{2}},{\frac {\pi }{2}}\right]\times [0,2\pi )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/93628d06c8efe1c6f60365cc5f80f615c07bca13)





![{\displaystyle (u,v,\phi )\in (-\pi ,\pi ]\times [0,\infty )\times [0,2\pi )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/000c3d0efd5294a2c0d125ea8f4a1052147fc971)







 Matematikaportál • összefoglaló, színes tartalomajánló lap
Matematikaportál • összefoglaló, színes tartalomajánló lap









