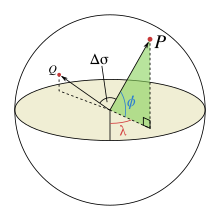
2点(P,Q)間の大円距離(赤線部)。u,vは赤道との交点 大円距離 (だいえんきょり、英 : great-circular distance )は、球面 上の大円 に沿う距離 をさす。大円の性質により、球面上の経路として2点間の最短距離 である。
特に地球上においては大圏距離 (たいけんきょり)とも言う。なおこの記事では回転楕円体 面上の最短距離(測地距離)は扱わない。
ユークリッド空間 では、球内部を通り2点間を直線で結ぶユークリッド距離 が最小となるが(したがって大円弦長)、球面上には直線が存在しないためこれとは異なる。 非ユークリッド空間 では、直線を一般化した測地線 を使用する。球面においては測地線は球の中心を中心とする円である大円 となるため、大円距離は大円上の2点間の弧の長さとなる。
球面上の対蹠点 以外の2点を通る大円は一意に定まる。 2点は大円を2つの弧に分割する。 そのうち短い方の弧の長さが大円距離となる。
対蹠点に関しては、その2点を通る任意の円が大円となるが、すべての円において2点間の弧の長さは一定である。すなわち半円の円周 であり、半径 r {\displaystyle r} π r {\displaystyle \pi r}
地球はほぼ球状であるため、2点間の距離を球として計算しても誤差は0.5%以内となる(後述)。[ 1]
大円の弧(大圏コース )は等角航路やisoazimuthal線と同様に地球上の任意の2点間を結ぶことができる3つの手法の一つである。
2点P,Q間の中心角 Δ σ {\displaystyle \Delta \sigma } 2点間の大円距離 d {\displaystyle d} 中心角 である弧度 Δ σ {\displaystyle \Delta \sigma } r {\displaystyle r}
d = r Δ σ {\displaystyle d=r\,\Delta \sigma } 大円距離の計算は、航空機や船舶の経路計算の一部であり、大円距離以外に、出発点および中間の各点における方位角の計算も行う。 海里 の距離の計算の際は度数法 における分がそのまま海里として用いられる(度で表したものの60倍)。
弧度 Δ σ {\displaystyle \Delta \sigma } 球面余弦定理 を用いて計算されることが多い。 ϕ 1 , λ 1 {\displaystyle \phi _{1},\lambda _{1}} ϕ 2 , λ 2 {\displaystyle \phi _{2},\lambda _{2}} 緯度 と経度 とし、 Δ ϕ , Δ λ {\displaystyle \Delta \phi ,\Delta \lambda }
Δ σ = arccos ( sin ϕ 1 ⋅ sin ϕ 2 + cos ϕ 1 ⋅ cos ϕ 2 ⋅ cos Δ λ ) {\displaystyle \Delta \sigma =\arccos {\bigl (}\sin \phi _{1}\cdot \sin \phi _{2}+\cos \phi _{1}\cdot \cos \phi _{2}\cdot \cos \Delta \lambda {\bigr )}} ただし、この arccos {\displaystyle \arccos } 浮動小数点数 を扱う計算機においては、短い距離において大きな丸め誤差 が発生し精度条件が悪化する[ 2] 64ビットの浮動小数点数 においては数メートル以上の距離においては問題を起こさないとの意見もある[ 3]
単位球面における大円の弦長 Δ σ c {\displaystyle \Delta \sigma _{\text{c}}} 弧度 Δ σ {\displaystyle \Delta \sigma } [ 4]
Δ σ c = 2 sin Δ σ 2 {\displaystyle \Delta \sigma _{\text{c}}=2\sin {\frac {\Delta \sigma }{2}}} Δ σ = 2 arcsin Δ σ c 2 {\displaystyle \Delta \sigma =2\arcsin {\frac {\Delta \sigma _{\text{c}}}{2}}} arcsin {\displaystyle \arcsin } [ 5] [ 6] haversine関数 [ 7] 弧度 を求める計算で、下記の弦長計算式とhaversineの関数表を用いた。
弦長 Δ σ c {\displaystyle \Delta \sigma _{\text{c}}} ϕ m ≜ ϕ 1 + ϕ 2 2 {\displaystyle \phi _{\textrm {m}}\triangleq {\frac {\phi _{1}+\phi _{2}}{2}}}
Δ σ c = 2 sin 2 ( Δ ϕ 2 ) + cos ϕ 1 ⋅ cos ϕ 2 ⋅ sin 2 ( Δ λ 2 ) , = 2 ( sin Δ λ 2 cos ϕ m ) 2 + ( cos Δ λ 2 sin Δ ϕ 2 ) 2 . {\displaystyle {\begin{aligned}\Delta \sigma _{\text{c}}&=2{\sqrt {\sin ^{2}\left({\frac {\Delta \phi }{2}}\right)+\cos {\phi _{1}}\cdot \cos {\phi _{2}}\cdot \sin ^{2}\left({\frac {\Delta \lambda }{2}}\right)}}\ ,\\&=2{\sqrt {\left(\sin {\frac {\Delta \lambda }{2}}\cos \phi _{\textrm {m}}\right)^{2}+\left(\cos {\frac {\Delta \lambda }{2}}\sin {\frac {\Delta \phi }{2}}\right)^{2}}}\ .\end{aligned}}}
上記の計算式は球面上のほとんどの点の間において正確だが、対蹠点間に対しては arcsin {\displaystyle \arcsin }
対策として、すべての距離に用いることができる式として逆正接関数 arctan {\displaystyle \arctan } [ 8] [ 9]
Δ σ = arctan sin Δ σ cos Δ σ , {\displaystyle \Delta \sigma =\arctan {\frac {\sin \Delta \sigma }{\cos \Delta \sigma }},} cos Δ σ = sin ϕ 1 ⋅ sin ϕ 2 + cos ϕ 1 ⋅ cos ϕ 2 ⋅ cos Δ λ , {\displaystyle \cos \Delta \sigma =\sin \phi _{1}\cdot \sin \phi _{2}+\cos \phi _{1}\cdot \cos \phi _{2}\cdot \cos \Delta \lambda ,} sin Δ σ = ( cos ϕ 2 ⋅ sin Δ λ ) 2 + ( cos ϕ 1 ⋅ sin ϕ 2 − sin ϕ 1 ⋅ cos ϕ 2 ⋅ cos Δ λ ) 2 . {\displaystyle \sin \Delta \sigma ={\sqrt {\left(\cos \phi _{2}\cdot \sin \Delta \lambda \right)^{2}+\left(\cos \phi _{1}\cdot \sin \phi _{2}-\sin \phi _{1}\cdot \cos \phi _{2}\cdot \cos \Delta \lambda \right)^{2}}}.}
単位球面における大円弦長 Δ σ c {\displaystyle \Delta \sigma _{\text{c}}} 直交座標系 を経由しても計算できる。
Δ σ c = ( Δ X ) 2 + ( Δ Y ) 2 + ( Δ Z ) 2 Δ X ≜ cos ϕ 2 ⋅ cos λ 2 − cos ϕ 1 ⋅ cos λ 1 Δ Y ≜ cos ϕ 2 ⋅ sin λ 2 − cos ϕ 1 ⋅ sin λ 1 Δ Z ≜ sin ϕ 2 − sin ϕ 1 {\displaystyle {\begin{aligned}\Delta \sigma _{\text{c}}&={\sqrt {(\Delta {X})^{2}+(\Delta {Y})^{2}+(\Delta {Z})^{2}}}\\\Delta {X}&\triangleq \cos \phi _{2}\cdot \cos \lambda _{2}-\cos \phi _{1}\cdot \cos \lambda _{1}\\\Delta {Y}&\triangleq \cos \phi _{2}\cdot \sin \lambda _{2}-\cos \phi _{1}\cdot \sin \lambda _{1}\\\Delta {Z}&\triangleq \sin \phi _{2}-\sin \phi _{1}\end{aligned}}}
弧度 Δ σ {\displaystyle \Delta \sigma } 内積 と外積 により以下のように表すことができる[ 10] n 1 {\displaystyle \mathbf {n} _{1}} n 2 {\displaystyle \mathbf {n} _{2}}
Δ σ = arccos ( n 1 ⋅ n 2 ) Δ σ = arcsin | n 1 × n 2 | Δ σ = arctan | n 1 × n 2 | n 1 ⋅ n 2 {\displaystyle {\begin{aligned}\Delta \sigma &=\arccos(\mathbf {n} _{1}\cdot \mathbf {n} _{2})\\\Delta \sigma &=\arcsin \left|\mathbf {n} _{1}\times \mathbf {n} _{2}\right|\\\Delta \sigma &=\arctan {\frac {\left|\mathbf {n} _{1}\times \mathbf {n} _{2}\right|}{\mathbf {n} _{1}\cdot \mathbf {n} _{2}}}\\\end{aligned}}\,\!}
地球の形状は回転軸方向に潰れた球(扁球 )とみなすことができる。この時赤道半径 a {\displaystyle a} b {\displaystyle b} b 2 / a {\displaystyle b^{2}/a} a 2 / b {\displaystyle a^{2}/b}
この値として平均地球半径を用いるとよく[ 11] R 1 = 1 3 ( 2 a + b ) ≈ 6371 k m {\displaystyle R_{1}={\frac {1}{3}}(2a+b)\approx 6371\,\mathrm {km} } GRS 80 における回転楕円体 近似に対して)である。 扁平率 が小さい場合はこの値が平均自乗誤差 を最小化する。
^ Admiralty Manual of Navigation, Volume 1 , The Stationery Office, (1987), p. 10, ISBN 9780117728806, https://books.google.co.jp/books?id=xcy4K5BPyg4C&pg=PA10&redir_esc=y&hl=ja ^ たとえば地球上においては1 kmの距離に対して0.99999999となる。 ^ “Calculate distance, bearing and more between Latitude/Longitude points”. 10 Aug 2013 閲覧。 ^ Δ σ c = 0 {\displaystyle \Delta \sigma _{\text{c}}=0} Δ σ = Δ σ c ( 1 + Δ σ c 2 24 + 3 Δ σ c 4 640 + ⋯ ) {\displaystyle \Delta \sigma =\Delta \sigma _{\text{c}}\left(1+{\frac {\Delta \sigma _{\text{c}}^{2}}{24}}+{\frac {3\Delta \sigma _{\text{c}}^{4}}{640}}+\cdots \right)} ^ もしくは逆haversine関数。 ^ Sinnott, Roger W. (August 1984). “Virtues of the Haversine”. Sky and Telescope 68 (2): 159. ^ hav ( θ ) ≜ sin 2 ( θ / 2 ) {\displaystyle \operatorname {hav} (\theta )\triangleq \sin ^{2}(\theta /2)} ^ プログラミングの際は通常の逆正接関数(atan())よりも atan2() 関数を用いたほうが、 Δ σ {\displaystyle \Delta \sigma } ^ Vincenty, Thaddeus (1975-04-01). “Direct and Inverse Solutions of Geodesics on the Ellipsoid with Application of Nested Equations” (PDF ). Survey Review (Kingston Road, Tolworth, Surrey: Directorate of Overseas Surveys) 23 (176): 88–93. doi:10.1179/sre.1975.23.176.88. http://www.ngs.noaa.gov/PUBS_LIB/inverse.pdf 2008年7月21日 閲覧。 ^ Gade, Kenneth (2010). “A non-singular horizontal position representation” (PDF). The Journal of Navigation (Cambridge University Press) 63 (3): 395–417. doi:10.1017/S0373463309990415. http://www.navlab.net/Publications/A_Nonsingular_Horizontal_Position_Representation.pdf . ^ McCaw, G. T. (1932). “Long lines on the Earth”. Empire Survey Review 1 (6): 259–263. doi:10.1179/sre.1932.1.6.259.