「直交座標 」はこの項目へ転送されています。デカルト座標系については「直交座標系 」をご覧ください。
数学 において、直交曲線座標 (ちょっこうきょくせんざひょう)、直交座標 (ちょっこうざひょう、英 : orthogonal coordinates )とは、座標超曲面同士が互いに直交するようなd個の座標 q = (q 1 , q 2 , ..., q d Einstein notation ) を意味する)。ある座標q k q k デカルト座標系 (x, y, z) では「x = 定数」、「y = 定数」、「z = 定数」は座標超曲面であるが、これらが互いに直角に交るので、直交座標系である。直交曲線座標は曲線座標の特殊な例である。
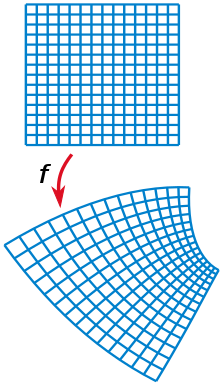
動機 矩形グリッドに施される等角写像 。曲がったグリッドの直交性 は保持されている。 ベクトル同士の演算や物理法則の導出は、通常、デカルト座標系 (英 : Cartesian coordinates ) で行うのが最も簡単であるが、量子力学 における場の理論、流体力学 、等角性を保持する地図投影(正角図法 )、電気力学 、プラズマ物理学 、化学種 や熱 の拡散 等において生じるような境界値問題 においては、デカルト座標ではない直交座標(非デカルト直交座標、即ち直交座標)がよく用いられる。
非デカルト直交座標の利点は、問題の対称性 に合わせて座標を選ぶことができる点である。例えば、地面(あるいは他の障害物)から遠く離れた場所での爆発による圧力波 は、デカルト座標では3次元空間に依存するが、球座標 では問題はほぼ1次元となる(圧力波は時間と中心からの距離のみに依存するため)。デカルト座標では偏微分方程式を含む2次元の境界値問題を解かなければならないが、円筒座標 では偏微分方程式 を用いずとも、常微分方程式 で表現可能1次元の問題に帰着される。
一般的な曲線座標(英語版) (英 : curvilinear coordinates ) ではなく、直交曲線座標を好まれる理由は、これを用いたほうが単純であるからである。直交しない座標では多くの複雑な問題が発生する。例えば、直交曲線座標では、多くの問題が変数分離によって解決されることがある。変数分離 とは、複雑なd次元の問題を、「既知の関数で解くことができるd個の1次元の問題」に変換する数学的手法である。多くの方程式は、ラプラス方程式 やヘルムホルツ方程式 に還元することができる。ラプラス方程式は、下表13番に示す座標系(トロイダル座標を除く下表14番に示す座標)で変数分離可能であり、ヘルムホルツ方程式は、下表11番の座標系で変数分離可能である[1] [2]
直交曲線座標は、計量テンソル の非対角項を決して持たない。つまり、無限小の2乗距離、即ち ds 2 は、常に、「無限小の座標変位の2乗の総和 」として書くことができる。
即ち、: d s 2 = ∑ k = 1 d ( h k d q k ) 2 {\displaystyle ds^{2}=\sum _{k=1}^{d}\left(h_{k}\,dq^{k}\right)^{2}}
ここで、d は次次元を表す。 また、スケーリング関数(スケールファクター、h-パラメータ)
h k ( q ) = d e f g k k ( q ) = | e k | {\displaystyle h_{k}(\mathbf {q} )\ {\stackrel {\mathrm {def} }{=}}\ {\sqrt {g_{kk}(\mathbf {q} )}}=|\mathbf {e} _{k}|} は、計量テンソルの対角成分の平方根(後述する局所基底ベクトル (英 : local basis vectors ) e k {\displaystyle \mathbf {e} _{k}} h i 勾配 、ラプラシアン 、発散や回転を計算する上でも使用される。
2次元の直交曲線座標の一例を生成する簡単な方法として、標準的なデカルト座標(x , y ) が定める2次元格子の共形写像 による方法がある。非ゼロの複素微分を持つ正則関数 w = f (z ) は共形写像 を生成する。得られた複素数をw = u + iv x と y の直線と同じように定数 u と v の曲線は直交する。
3次元以上の直交曲線座標の一例を生成する方法の一つとして、直交する2次元座標系から、新しい次元に投影する(「円筒座標 」)か、2次元座標系をその対称軸の1つを中心に回転させる方法がある。 しかし、2次元座標系を射影したり回転させたりしても得られない3次元の直交曲線座標系もあり、例えば楕円体座標(英語版) はそのような例である。より一般的な直交曲線座標は、いくつかの必要な座標面から出発し、その直交軌道を考えることで得られることがある。
基底ベクトル 共変基底(Covariant basis) デカルト座標では、基底ベクトル は固定(一定)である。より一般的な曲線座標(英語版) では、座標によって空間の点が指定され、そのような点ごとに基底ベクトルの集合が束ねられるが、それは一般に一定ではない。直交曲線座標の特徴は、基底ベクトルが変化しても、互いに対して常に直交 していることである。言い換えれば
e i ⋅ e j = 0 if i ≠ j {\displaystyle \mathbf {e} _{i}\cdot \mathbf {e} _{j}=0\quad {\text{if}}\quad i\neq j} これらの基底ベクトル「ある座標を変化させ、他の座標を固定して得られる曲線の接ベクトル 」として定義される。即ち、
e i = ∂ r ∂ q i {\displaystyle \mathbf {e} _{i}={\frac {\partial \mathbf {r} }{\partial q^{i}}}} 2次元直交座標の可視化。1つの座標以外を一定にして得られる曲線が、基底ベクトルとともに示されている。基底ベクトルは長さが等しくないことに注意すること:等しい必要はなく、直交していればよい。 ここで 'r は何らかの点を表し、q i
なお、ベクトルは必ずしも等しい長さとは限らない。座標のスケールファクターとして知られる便利な関数は、単に基底ベクトル e i {\displaystyle {\mathbf {e} }_{i}} h i {\displaystyle h_{i}} 弾性論 におけるラメ定数 と混同しないように注意のこと。
単位ベクトル(正規化 基底ベクトル)をハット付きで表記し、これは、上記の e i {\displaystyle {\mathbf {e} }_{i}}
e ^ i = e i h i = e i | e i | {\displaystyle {\hat {\mathbf {e} }}_{i}={\frac {{\mathbf {e} }_{i}}{h_{i}}}={\frac {{\mathbf {e} }_{i}}{\left|{\mathbf {e} }_{i}\right|}}} ベクトル場 は「基底ベクトル」( e i {\displaystyle {\mathbf {e} }_{i}} e ^ i {\displaystyle {\hat {\mathbf {e} }}_{i}}
反変基底(Contravariant basis) 前節に示した基底ベクトル( e ^ i {\displaystyle {\hat {\mathbf {e} }}_{i}} 共変 基底ベクトルといわれるが、それはベクトルと「共変」するからである。直交曲線座標の場合、反変基底ベクトル ( e i {\displaystyle \mathbf {e} ^{i}}
e i = e ^ i h i = e i h i 2 {\displaystyle \mathbf {e} ^{i}={\frac {{\hat {\mathbf {e} }}_{i}}{h_{i}}}={\frac {\mathbf {e} _{i}}{h_{i}^{2}}}} クロネッカーのデルタ を使うと、 e i = δ i j {\displaystyle \mathbf {e} _{i}=\delta _{i}^{j}}
また、
e ^ i = e i h i = h i e i = e ^ i {\displaystyle {\hat {\mathbf {e} }}_{i}={\frac {\mathbf {e} _{i}}{h_{i}}}=h_{i}\mathbf {e} ^{i}={\hat {\mathbf {e} }}^{i}} 我々は、直交曲線座標上の「ベクトル」を記述するためによく使われる3つの異なる基底セット、 即ち、共変基底e i e i ê i objective quantity ,であり、その同一性はどの座標系にも依存しないが、「ベクトル」の成分はそのベクトルがどの基底で表現されるかに依存する。
x = ∑ i x i e i = ∑ i x i e i {\displaystyle \mathbf {x} =\sum _{i}x^{i}\mathbf {e} _{i}=\sum _{i}x_{i}\mathbf {e} ^{i}} 添字の位置は成分の計算方法を表している(上付の添字を指数 と混同してはいけない)。なお、すべての基底ベクトル(i =1, 2, ..., d )に対する和を示す記号Σ(大文字のSigma )と和の範囲は、しばしば省略(アインシュタイン表記 )されることがある。それぞれの基底における成分同士の関係は、以下のようになる。
h i 2 x i = x i {\displaystyle h_{i}^{2}x^{i}=x_{i}} 正規化基底に関するベクトルの成分を指定するために広く使われている表記法はない。本稿では、ベクトル成分には添え字を用い、成分が正規化基底で計算されていることに着目する。
ベクトル代数 ベクトルの加算とマイナスは、デカルト座標と同様に成分毎に行うことが出来、複雑な操作は不要である。他のベクトル演算については、特別な配慮が必要な場合がある。 ただし、これらの演算はすべてベクトル場 の2つのベクトルが同じ点に束縛されている(言い換えれば、ベクトルの尾が一致している)ことを前提としていることに注意のこと。基底ベクトルは一般に直交曲線座標で変化するため、空間上の異なる点で計算された成分を持つ2つのベクトルを足し合わせる場合、基底ベクトルの違いを考慮する必要がある。
内積(Dot product) デカルト座標系における内積 においては、(ユークリッド空間 に直交基底を考えると)単純に成分の積の和になる。同様に、直交曲線座標でも、2つのベクトル x と y の内積は、ベクトルの成分を正規化基底で表示すると、このような馴染みのある形になる。
x ⋅ y = ∑ i x i e ^ i ⋅ ∑ j y j e ^ j = ∑ i x i y i {\displaystyle \mathbf {x} \cdot \mathbf {y} =\sum _{i}x_{i}{\hat {\mathbf {e} }}_{i}\cdot \sum _{j}y_{j}{\hat {\mathbf {e} }}_{j}=\sum _{i}x_{i}y_{i}} これは、ある点での正規化基底がデカルト座標系を形成できるという事実の直接的な帰結である。この基底は正規直交基底 である。
x ⋅ y = ∑ i h i 2 x i y i = ∑ i x i y i h i 2 = ∑ i x i y i = ∑ i x i y i {\displaystyle \mathbf {x} \cdot \mathbf {y} =\sum _{i}h_{i}^{2}x^{i}y^{i}=\sum _{i}{\frac {x_{i}y_{i}}{h_{i}^{2}}}=\sum _{i}x^{i}y_{i}=\sum _{i}x_{i}y^{i}} これは、ベクトルを成分形式で書き出し、基底ベクトルを正規化し、内積を取ることで容易に導き出すことができる。例えば、2Dの場合、
x ⋅ y = ( x 1 e 1 + x 2 e 2 ) ⋅ ( y 1 e 1 + y 2 e 2 ) = ( x 1 h 1 e ^ 1 + x 2 h 2 e ^ 2 ) ⋅ ( y 1 e ^ 1 h 1 + y 2 e ^ 2 h 2 ) = x 1 y 1 + x 2 y 2 {\displaystyle {\begin{aligned}\mathbf {x} \cdot \mathbf {y} &=\left(x^{1}\mathbf {e} _{1}+x^{2}\mathbf {e} _{2}\right)\cdot \left(y_{1}\mathbf {e} ^{1}+y_{2}\mathbf {e} ^{2}\right)\\[10pt]&=\left(x^{1}h_{1}{\hat {\mathbf {e} }}_{1}+x^{2}h_{2}{\hat {\mathbf {e} }}_{2}\right)\cdot \left(y_{1}{\frac {{\hat {\mathbf {e} }}^{1}}{h_{1}}}+y_{2}{\frac {{\hat {\mathbf {e} }}^{2}}{h_{2}}}\right)=x^{1}y_{1}+x^{2}y_{2}\end{aligned}}} ここでは、正規化された共変基底と反変基底が等しいことが利用されている。
外積(Cross product) 3次元デカルト座標における外積 は、以下の通りである。
x × y = ( x 2 y 3 − x 3 y 2 ) e ^ 1 + ( x 3 y 1 − x 1 y 3 ) e ^ 2 + ( x 1 y 2 − x 2 y 1 ) e ^ 3 {\displaystyle \mathbf {x} \times \mathbf {y} =(x_{2}y_{3}-x_{3}y_{2}){\hat {\mathbf {e} }}_{1}+(x_{3}y_{1}-x_{1}y_{3}){\hat {\mathbf {e} }}_{2}+(x_{1}y_{2}-x_{2}y_{1}){\hat {\mathbf {e} }}_{3}} そして、直交曲線座標系でも、成分を正規化した基準で計算すれば、上記の式は有効である。
直交曲線座標において、共変基底あるいは反変基底を考えた場合の外積を構成するには、やはり基底ベクトルを正規化する必要がある。例えば、
x × y = ∑ i x i e i × ∑ j y j e j = ∑ i x i h i e ^ i × ∑ j y j h j e ^ j {\displaystyle \mathbf {x} \times \mathbf {y} =\sum _{i}x^{i}\mathbf {e} _{i}\times \sum _{j}y^{j}\mathbf {e} _{j}=\sum _{i}x^{i}h_{i}{\hat {\mathbf {e} }}_{i}\times \sum _{j}y^{j}h_{j}{\hat {\mathbf {e} }}_{j}} さらに展開すれば、 ( e 1 , e 2 , e 3 ) {\displaystyle ({\mathbf {e} }_{1},{\mathbf {e} }_{2},{\mathbf {e} }_{3})}
x × y = ( x 2 y 3 − x 3 y 2 ) h 2 h 3 h 1 e 1 + ( x 3 y 1 − x 1 y 3 ) h 1 h 3 h 2 e 2 + ( x 1 y 2 − x 2 y 1 ) h 1 h 2 h 3 e 3 {\displaystyle \mathbf {x} \times \mathbf {y} =\left(x^{2}y^{3}-x^{3}y^{2}\right){\frac {h_{2}h_{3}}{h_{1}}}\mathbf {e} _{1}+\left(x^{3}y^{1}-x^{1}y^{3}\right){\frac {h_{1}h_{3}}{h_{2}}}\mathbf {e} _{2}+\left(x^{1}y^{2}-x^{2}y^{1}\right){\frac {h_{1}h_{2}}{h_{3}}}\mathbf {e} _{3}} 直交しない座標や高次元への一般化を単純化するために、外積の簡潔な表記がレビ・チビタテンソル で可能であるが、スケールファクターがすべて1に等しくない場合、0と1以外の成分を持つことになる。
ベクトル解析 微分 ある点からの無限小の変位を見てみると、明らかに以下が成り立つ。
d r = ∑ i ∂ r ∂ q i d q i = ∑ i e i d q i {\displaystyle d\mathbf {r} =\sum _{i}{\frac {\partial \mathbf {r} }{\partial q^{i}}}\,dq^{i}=\sum _{i}\mathbf {e} _{i}\,dq^{i}} 定義によれば、関数の勾配は以下を満たさなければならない(この定義はƒ が任意のテンソル であっても真である)。
d f = ∇ f ⋅ d r ⇒ d f = ∇ f ⋅ ∑ i e i d q i {\displaystyle df=\nabla f\cdot d\mathbf {r} \quad \Rightarrow \quad df=\nabla f\cdot \sum _{i}\mathbf {e} _{i}\,dq^{i}} 従って、ナブラ演算子 は必ず、以下を満たさねばならないことになる。
∇ = ∑ i e i ∂ ∂ q i {\displaystyle \nabla =\sum _{i}\mathbf {e} ^{i}{\frac {\partial }{\partial q^{i}}}} これは、これは直交曲線座標に限らない一般的な曲線座標の場合にも当てはまる。勾配 やラプラシアン のような演算子は、この演算子を適切に適用することで得られるものである。
基底ベクトルの式(Basis vector formulae) d'r と正規化基底ベクトル ê i [3] [4]
Differential element Vectors Scalars 線要素 Tangent vector to coordinate curve qi : d ℓ = h i d q i e ^ i = ∂ r ∂ q i d q i {\displaystyle d{\boldsymbol {\ell }}=h_{i}dq^{i}{\hat {\mathbf {e} }}_{i}={\frac {\partial \mathbf {r} }{\partial q^{i}}}dq^{i}}
Infinitesimal length d ℓ = d r ⋅ d r = ( h 1 d q 1 ) 2 + ( h 2 d q 2 ) 2 + ( h 3 d q 3 ) 2 {\displaystyle d\ell ={\sqrt {d\mathbf {r} \cdot d\mathbf {r} }}={\sqrt {(h_{1}\,dq^{1})^{2}+(h_{2}\,dq^{2})^{2}+(h_{3}\,dq^{3})^{2}}}}
面積要素 Normal to coordinate surface qk = constant: d S = ( h i d q i e ^ i ) × ( h j d q j e ^ j ) = d q i d q j ( ∂ r ∂ q i × ∂ r ∂ q j ) = h i h j d q i d q j e ^ k {\displaystyle {\begin{aligned}d\mathbf {S} &=(h_{i}dq^{i}{\hat {\mathbf {e} }}_{i})\times (h_{j}dq^{j}{\hat {\mathbf {e} }}_{j})\\&=dq^{i}dq^{j}\left({\frac {\partial \mathbf {r} }{\partial q^{i}}}\times {\frac {\partial \mathbf {r} }{\partial q^{j}}}\right)\\&=h_{i}h_{j}dq^{i}dq^{j}{\hat {\mathbf {e} }}_{k}\end{aligned}}}
Infinitesimal surface d S k = h i h j d q i d q j {\displaystyle dS_{k}=h_{i}h_{j}\,dq^{i}\,dq^{j}}
体積要素 N/A Infinitesimal volume d V = | ( h 1 d q 1 e ^ 1 ) ⋅ ( h 2 d q 2 e ^ 2 ) × ( h 3 d q 3 e ^ 3 ) | = | e ^ 1 ⋅ e ^ 2 × e ^ 3 | h 1 h 2 h 3 d q 1 d q 2 d q 3 = h 1 h 2 h 3 d q 1 d q 2 d q 3 = J d q 1 d q 2 d q 3 {\displaystyle {\begin{aligned}dV&=|(h_{1}\,dq^{1}{\hat {\mathbf {e} }}_{1})\cdot (h_{2}\,dq^{2}{\hat {\mathbf {e} }}_{2})\times (h_{3}\,dq^{3}{\hat {\mathbf {e} }}_{3})|\\&=|{\hat {\mathbf {e} }}_{1}\cdot {\hat {\mathbf {e} }}_{2}\times {\hat {\mathbf {e} }}_{3}|h_{1}h_{2}h_{3}\,dq^{1}\,dq^{2}\,dq^{3}\\&=h_{1}h_{2}h_{3}\,dq^{1}\,dq^{2}\,dq^{3}\\&=J\,dq^{1}\,dq^{2}\,dq^{3}\end{aligned}}}
ここで、
J = ∂ r ∂ q 1 ⋅ ( ∂ r ∂ q 2 × ∂ r ∂ q 3 ) = ∂ ( x , y , z ) ∂ ( q 1 , q 2 , q 3 ) = h 1 h 2 h 3 > 0 {\displaystyle J={\frac {\partial \mathbf {r} }{\partial q^{1}}}\cdot \left({\frac {\partial \mathbf {r} }{\partial q^{2}}}\times {\frac {\partial \mathbf {r} }{\partial q^{3}}}\right)={\frac {\partial (x,y,z)}{\partial (q^{1},q^{2},q^{3})}}=h_{1}h_{2}h_{3}>0} はヤコビ行列式 で、これは「デカルト座標における無限小の立方体 dx dy dz 」から、「無限小の曲った立方体」への体積の変形という幾何学的解釈を持つものである。ただしここで ヤコビ行列式は正と仮定してあることに注意する (一般にはヤコビ行列式は0でなければよいので負の値も許される)。以下ではヤコビ行列式が正の場合のみ考える。
積分 上に示した線素を用いると、ベクトル F の経路 P {\displaystyle \scriptstyle {\mathcal {P}}} 線積分 は次のようになる。
∫ P F ⋅ d r = ∫ P ∑ i F i e i ⋅ ∑ j e j d q j = ∑ i ∫ P F i d q i {\displaystyle \int _{\mathcal {P}}\mathbf {F} \cdot d\mathbf {r} =\int _{\mathcal {P}}\sum _{i}F_{i}\mathbf {e} ^{i}\cdot \sum _{j}\mathbf {e} _{j}\,dq^{j}=\sum _{i}\int _{\mathcal {P}}F_{i}\,dq^{i}} 1つの座標qk を一定にして記述した面の面積の無限小要素は、以下のように変換され、
d A k = ∏ i ≠ k d s i = ∏ i ≠ k h i d q i {\displaystyle dA_{k}=\prod _{i\neq k}ds_{i}=\prod _{i\neq k}h_{i}\,dq^{i}} 同様に、体積要素も以下のように変換される。
d V = ∏ i d s i = ∏ i h i d q i {\displaystyle dV=\prod _{i}ds_{i}=\prod _{i}h_{i}\,dq^{i}} ここで、大きな記号Π(πの大文字)は、総乗 を示す。即ち、すべてのスケールファクターの積はヤコビ行列式に等しいことを意味している。
例として、3次元のq 1 = 定数 で定まる面 S {\displaystyle \scriptstyle {\mathcal {S}}} F の面積分 は次のようになる。
∫ S F ⋅ d A = ∫ S F ⋅ n ^ d A = ∫ S F ⋅ e ^ 1 d A = ∫ S F 1 h 2 h 3 h 1 d q 2 d q 3 {\displaystyle \int _{\mathcal {S}}\mathbf {F} \cdot d\mathbf {A} =\int _{\mathcal {S}}\mathbf {F} \cdot {\hat {\mathbf {n} }}\ dA=\int _{\mathcal {S}}\mathbf {F} \cdot {\hat {\mathbf {e} }}_{1}\ dA=\int _{\mathcal {S}}F^{1}{\frac {h_{2}h_{3}}{h_{1}}}\,dq^{2}\,dq^{3}} ただし、F 1 /h 1 は、F の、この表面に垂直な成分である。
Differential operators in three dimensions これらの演算は応用上共通なので、本節ではすべてのベクトル成分を正規化基底を用いて以下のように示す。 F i = F ⋅ e ^ i {\displaystyle F_{i}=\mathbf {F} \cdot {\hat {\mathbf {e} }}_{i}}
Operator Expression Gradient of a scalar field ∇ ϕ = e ^ 1 h 1 ∂ ϕ ∂ q 1 + e ^ 2 h 2 ∂ ϕ ∂ q 2 + e ^ 3 h 3 ∂ ϕ ∂ q 3 {\displaystyle \nabla \phi ={\frac {{\hat {\mathbf {e} }}_{1}}{h_{1}}}{\frac {\partial \phi }{\partial q^{1}}}+{\frac {{\hat {\mathbf {e} }}_{2}}{h_{2}}}{\frac {\partial \phi }{\partial q^{2}}}+{\frac {{\hat {\mathbf {e} }}_{3}}{h_{3}}}{\frac {\partial \phi }{\partial q^{3}}}} Divergence of a vector field ∇ ⋅ F = 1 h 1 h 2 h 3 [ ∂ ∂ q 1 ( F 1 h 2 h 3 ) + ∂ ∂ q 2 ( F 2 h 3 h 1 ) + ∂ ∂ q 3 ( F 3 h 1 h 2 ) ] {\displaystyle \nabla \cdot \mathbf {F} ={\frac {1}{h_{1}h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{1}}}\left(F_{1}h_{2}h_{3}\right)+{\frac {\partial }{\partial q^{2}}}\left(F_{2}h_{3}h_{1}\right)+{\frac {\partial }{\partial q^{3}}}\left(F_{3}h_{1}h_{2}\right)\right]} Curl of a vector field ∇ × F = e ^ 1 h 2 h 3 [ ∂ ∂ q 2 ( h 3 F 3 ) − ∂ ∂ q 3 ( h 2 F 2 ) ] + e ^ 2 h 3 h 1 [ ∂ ∂ q 3 ( h 1 F 1 ) − ∂ ∂ q 1 ( h 3 F 3 ) ] + e ^ 3 h 1 h 2 [ ∂ ∂ q 1 ( h 2 F 2 ) − ∂ ∂ q 2 ( h 1 F 1 ) ] = 1 h 1 h 2 h 3 | h 1 e ^ 1 h 2 e ^ 2 h 3 e ^ 3 ∂ ∂ q 1 ∂ ∂ q 2 ∂ ∂ q 3 h 1 F 1 h 2 F 2 h 3 F 3 | {\displaystyle {\begin{aligned}\nabla \times \mathbf {F} &={\frac {{\hat {\mathbf {e} }}_{1}}{h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{2}}}\left(h_{3}F_{3}\right)-{\frac {\partial }{\partial q^{3}}}\left(h_{2}F_{2}\right)\right]+{\frac {{\hat {\mathbf {e} }}_{2}}{h_{3}h_{1}}}\left[{\frac {\partial }{\partial q^{3}}}\left(h_{1}F_{1}\right)-{\frac {\partial }{\partial q^{1}}}\left(h_{3}F_{3}\right)\right]\\[10pt]&+{\frac {{\hat {\mathbf {e} }}_{3}}{h_{1}h_{2}}}\left[{\frac {\partial }{\partial q^{1}}}\left(h_{2}F_{2}\right)-{\frac {\partial }{\partial q^{2}}}\left(h_{1}F_{1}\right)\right]={\frac {1}{h_{1}h_{2}h_{3}}}{\begin{vmatrix}h_{1}{\hat {\mathbf {e} }}_{1}&h_{2}{\hat {\mathbf {e} }}_{2}&h_{3}{\hat {\mathbf {e} }}_{3}\\{\dfrac {\partial }{\partial q^{1}}}&{\dfrac {\partial }{\partial q^{2}}}&{\dfrac {\partial }{\partial q^{3}}}\\h_{1}F_{1}&h_{2}F_{2}&h_{3}F_{3}\end{vmatrix}}\end{aligned}}} Laplacian of a scalar field ∇ 2 ϕ = 1 h 1 h 2 h 3 [ ∂ ∂ q 1 ( h 2 h 3 h 1 ∂ ϕ ∂ q 1 ) + ∂ ∂ q 2 ( h 3 h 1 h 2 ∂ ϕ ∂ q 2 ) + ∂ ∂ q 3 ( h 1 h 2 h 3 ∂ ϕ ∂ q 3 ) ] {\displaystyle \nabla ^{2}\phi ={\frac {1}{h_{1}h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{1}}}\left({\frac {h_{2}h_{3}}{h_{1}}}{\frac {\partial \phi }{\partial q^{1}}}\right)+{\frac {\partial }{\partial q^{2}}}\left({\frac {h_{3}h_{1}}{h_{2}}}{\frac {\partial \phi }{\partial q^{2}}}\right)+{\frac {\partial }{\partial q^{3}}}\left({\frac {h_{1}h_{2}}{h_{3}}}{\frac {\partial \phi }{\partial q^{3}}}\right)\right]}
上記の式は、レヴィ=チヴィタ記号 を用いてより簡潔に書くことができる。 ϵ i j k {\displaystyle \epsilon _{ijk}} J = h 1 h 2 h 3 > 0 {\displaystyle J=h_{1}h_{2}h_{3}>0}
Operator Expression Gradient of a scalar field ∇ ϕ = e ^ k h k ∂ ϕ ∂ q k {\displaystyle \nabla \phi ={\frac {{\hat {\mathbf {e} }}_{k}}{h_{k}}}{\frac {\partial \phi }{\partial q^{k}}}} Divergence of a vector field ∇ ⋅ F = 1 J ∂ ∂ q k ( J h k F k ) {\displaystyle \nabla \cdot \mathbf {F} ={\frac {1}{J}}{\frac {\partial }{\partial q^{k}}}\left({\frac {J}{h_{k}}}F_{k}\right)} Curl of a vector field (3D only) ∇ × F = h k e ^ k J ϵ i j k ∂ ∂ q i ( h j F j ) {\displaystyle \nabla \times \mathbf {F} ={\frac {h_{k}{\hat {\mathbf {e} }}_{k}}{J}}\epsilon _{ijk}{\frac {\partial }{\partial q^{i}}}\left(h_{j}F_{j}\right)} Laplacian of a scalar field ∇ 2 ϕ = 1 J ∂ ∂ q k ( J h k 2 ∂ ϕ ∂ q k ) {\displaystyle \nabla ^{2}\phi ={\frac {1}{J}}{\frac {\partial }{\partial q^{k}}}\left({\frac {J}{h_{k}^{2}}}{\frac {\partial \phi }{\partial q^{k}}}\right)}
また、スカラー場の勾配は正準偏導関数を含むヤコビ行列式 J で表現できることに注意。
J = [ ∂ ϕ ∂ q 1 , ∂ ϕ ∂ q 2 , ∂ ϕ ∂ q 3 ] {\displaystyle \mathbf {J} =\left[{\frac {\partial \phi }{\partial q^{1}}},{\frac {\partial \phi }{\partial q^{2}}},{\frac {\partial \phi }{\partial q^{3}}}\right]} upon a change of basis:
∇ ϕ = S R T J T {\displaystyle \nabla \phi =\mathbf {S} \mathbf {R} ^{T}\mathbf {J} ^{T}} where the rotation and scaling matrices are:
R = [ e 1 , e 2 , e 3 ] {\displaystyle \mathbf {R} =[\mathbf {e} _{1},\mathbf {e} _{2},\mathbf {e} _{3}]} S = d i a g ( [ h 1 − 1 , h 2 − 1 , h 3 − 1 ] ) . {\displaystyle \mathbf {S} =\mathrm {diag} ([h_{1}^{-1},h_{2}^{-1},h_{3}^{-1}]).} 直交曲線座標の表 通常の直交曲線座標の他に、いくつかのやや珍しい直交曲線座標を以下に表に示す[4]
Curvillinear coordinates (q 1 , q 2 , q 3 ) Transformation from cartesian (x , y , z ) Scale factors Spherical polar coordinates ( r , θ , ϕ ) ∈ [ 0 , ∞ ) × [ 0 , π ] × [ 0 , 2 π ) {\displaystyle (r,\theta ,\phi )\in [0,\infty )\times [0,\pi ]\times [0,2\pi )}
x = r sin θ cos ϕ y = r sin θ sin ϕ z = r cos θ {\displaystyle {\begin{aligned}x&=r\sin \theta \cos \phi \\y&=r\sin \theta \sin \phi \\z&=r\cos \theta \end{aligned}}} h 1 = 1 h 2 = r h 3 = r sin θ {\displaystyle {\begin{aligned}h_{1}&=1\\h_{2}&=r\\h_{3}&=r\sin \theta \end{aligned}}} Cylindrical polar coordinates ( r , ϕ , z ) ∈ [ 0 , ∞ ) × [ 0 , 2 π ) × ( − ∞ , ∞ ) {\displaystyle (r,\phi ,z)\in [0,\infty )\times [0,2\pi )\times (-\infty ,\infty )}
x = r cos ϕ y = r sin ϕ z = z {\displaystyle {\begin{aligned}x&=r\cos \phi \\y&=r\sin \phi \\z&=z\end{aligned}}} h 1 = h 3 = 1 h 2 = r {\displaystyle {\begin{aligned}h_{1}&=h_{3}=1\\h_{2}&=r\end{aligned}}} Parabolic cylindrical coordinates ( u , v , z ) ∈ ( − ∞ , ∞ ) × [ 0 , ∞ ) × ( − ∞ , ∞ ) {\displaystyle (u,v,z)\in (-\infty ,\infty )\times [0,\infty )\times (-\infty ,\infty )}
x = 1 2 ( u 2 − v 2 ) y = u v z = z {\displaystyle {\begin{aligned}x&={\frac {1}{2}}(u^{2}-v^{2})\\y&=uv\\z&=z\end{aligned}}} h 1 = h 2 = u 2 + v 2 h 3 = 1 {\displaystyle {\begin{aligned}h_{1}&=h_{2}={\sqrt {u^{2}+v^{2}}}\\h_{3}&=1\end{aligned}}} Parabolic coordinates ( u , v , ϕ ) ∈ [ 0 , ∞ ) × [ 0 , ∞ ) × [ 0 , 2 π ) {\displaystyle (u,v,\phi )\in [0,\infty )\times [0,\infty )\times [0,2\pi )}
x = u v cos ϕ y = u v sin ϕ z = 1 2 ( u 2 − v 2 ) {\displaystyle {\begin{aligned}x&=uv\cos \phi \\y&=uv\sin \phi \\z&={\frac {1}{2}}(u^{2}-v^{2})\end{aligned}}} h 1 = h 2 = u 2 + v 2 h 3 = u v {\displaystyle {\begin{aligned}h_{1}&=h_{2}={\sqrt {u^{2}+v^{2}}}\\h_{3}&=uv\end{aligned}}} Paraboloidal coordinates ( λ , μ , ν ) ∈ [ 0 , b 2 ) × ( b 2 , a 2 ) × ( a 2 , ∞ ) b 2 < a 2 {\displaystyle {\begin{aligned}&(\lambda ,\mu ,\nu )\in [0,b^{2})\times (b^{2},a^{2})\times (a^{2},\infty )\\&b^{2}<a^{2}\end{aligned}}}
x 2 q i − a 2 + y 2 q i − b 2 = 2 z + q i {\displaystyle {\frac {x^{2}}{q_{i}-a^{2}}}+{\frac {y^{2}}{q_{i}-b^{2}}}=2z+q_{i}} where ( q 1 , q 2 , q 3 ) = ( λ , μ , ν ) {\displaystyle (q_{1},q_{2},q_{3})=(\lambda ,\mu ,\nu )}
h i = 1 2 ( q j − q i ) ( q k − q i ) ( a 2 − q i ) ( b 2 − q i ) {\displaystyle h_{i}={\frac {1}{2}}{\sqrt {\frac {(q_{j}-q_{i})(q_{k}-q_{i})}{(a^{2}-q_{i})(b^{2}-q_{i})}}}} Ellipsoidal coordinates ( λ , μ , ν ) ∈ [ 0 , c 2 ) × ( c 2 , b 2 ) × ( b 2 , a 2 ) λ < c 2 < b 2 < a 2 , c 2 < μ < b 2 < a 2 , c 2 < b 2 < ν < a 2 , {\displaystyle {\begin{aligned}&(\lambda ,\mu ,\nu )\in [0,c^{2})\times (c^{2},b^{2})\times (b^{2},a^{2})\\&\lambda <c^{2}<b^{2}<a^{2},\\&c^{2}<\mu <b^{2}<a^{2},\\&c^{2}<b^{2}<\nu <a^{2},\end{aligned}}}
x 2 a 2 − q i + y 2 b 2 − q i + z 2 c 2 − q i = 1 {\displaystyle {\frac {x^{2}}{a^{2}-q_{i}}}+{\frac {y^{2}}{b^{2}-q_{i}}}+{\frac {z^{2}}{c^{2}-q_{i}}}=1} where ( q 1 , q 2 , q 3 ) = ( λ , μ , ν ) {\displaystyle (q_{1},q_{2},q_{3})=(\lambda ,\mu ,\nu )}
h i = 1 2 ( q j − q i ) ( q k − q i ) ( a 2 − q i ) ( b 2 − q i ) ( c 2 − q i ) {\displaystyle h_{i}={\frac {1}{2}}{\sqrt {\frac {(q_{j}-q_{i})(q_{k}-q_{i})}{(a^{2}-q_{i})(b^{2}-q_{i})(c^{2}-q_{i})}}}} Elliptic cylindrical coordinates ( u , v , z ) ∈ [ 0 , ∞ ) × [ 0 , 2 π ) × ( − ∞ , ∞ ) {\displaystyle (u,v,z)\in [0,\infty )\times [0,2\pi )\times (-\infty ,\infty )}
x = a cosh u cos v y = a sinh u sin v z = z {\displaystyle {\begin{aligned}x&=a\cosh u\cos v\\y&=a\sinh u\sin v\\z&=z\end{aligned}}} h 1 = h 2 = a sinh 2 u + sin 2 v h 3 = 1 {\displaystyle {\begin{aligned}h_{1}&=h_{2}=a{\sqrt {\sinh ^{2}u+\sin ^{2}v}}\\h_{3}&=1\end{aligned}}} Prolate spheroidal coordinates ( ξ , η , ϕ ) ∈ [ 0 , ∞ ) × [ 0 , π ] × [ 0 , 2 π ) {\displaystyle (\xi ,\eta ,\phi )\in [0,\infty )\times [0,\pi ]\times [0,2\pi )}
x = a sinh ξ sin η cos ϕ y = a sinh ξ sin η sin ϕ z = a cosh ξ cos η {\displaystyle {\begin{aligned}x&=a\sinh \xi \sin \eta \cos \phi \\y&=a\sinh \xi \sin \eta \sin \phi \\z&=a\cosh \xi \cos \eta \end{aligned}}} h 1 = h 2 = a sinh 2 ξ + sin 2 η h 3 = a sinh ξ sin η {\displaystyle {\begin{aligned}h_{1}&=h_{2}=a{\sqrt {\sinh ^{2}\xi +\sin ^{2}\eta }}\\h_{3}&=a\sinh \xi \sin \eta \end{aligned}}} Oblate spheroidal coordinates ( ξ , η , ϕ ) ∈ [ 0 , ∞ ) × [ − π 2 , π 2 ] × [ 0 , 2 π ) {\displaystyle (\xi ,\eta ,\phi )\in [0,\infty )\times \left[-{\frac {\pi }{2}},{\frac {\pi }{2}}\right]\times [0,2\pi )}
x = a cosh ξ cos η cos ϕ y = a cosh ξ cos η sin ϕ z = a sinh ξ sin η {\displaystyle {\begin{aligned}x&=a\cosh \xi \cos \eta \cos \phi \\y&=a\cosh \xi \cos \eta \sin \phi \\z&=a\sinh \xi \sin \eta \end{aligned}}} h 1 = h 2 = a sinh 2 ξ + sin 2 η h 3 = a cosh ξ cos η {\displaystyle {\begin{aligned}h_{1}&=h_{2}=a{\sqrt {\sinh ^{2}\xi +\sin ^{2}\eta }}\\h_{3}&=a\cosh \xi \cos \eta \end{aligned}}} Bipolar cylindrical coordinates ( u , v , z ) ∈ [ 0 , 2 π ) × ( − ∞ , ∞ ) × ( − ∞ , ∞ ) {\displaystyle (u,v,z)\in [0,2\pi )\times (-\infty ,\infty )\times (-\infty ,\infty )}
x = a sinh v cosh v − cos u y = a sin u cosh v − cos u z = z {\displaystyle {\begin{aligned}x&={\frac {a\sinh v}{\cosh v-\cos u}}\\y&={\frac {a\sin u}{\cosh v-\cos u}}\\z&=z\end{aligned}}} h 1 = h 2 = a cosh v − cos u h 3 = 1 {\displaystyle {\begin{aligned}h_{1}&=h_{2}={\frac {a}{\cosh v-\cos u}}\\h_{3}&=1\end{aligned}}} Toroidal coordinates ( u , v , ϕ ) ∈ ( − π , π ] × [ 0 , ∞ ) × [ 0 , 2 π ) {\displaystyle (u,v,\phi )\in (-\pi ,\pi ]\times [0,\infty )\times [0,2\pi )}
x = a sinh v cos ϕ cosh v − cos u y = a sinh v sin ϕ cosh v − cos u z = a sin u cosh v − cos u {\displaystyle {\begin{aligned}x&={\frac {a\sinh v\cos \phi }{\cosh v-\cos u}}\\y&={\frac {a\sinh v\sin \phi }{\cosh v-\cos u}}\\z&={\frac {a\sin u}{\cosh v-\cos u}}\end{aligned}}} h 1 = h 2 = a cosh v − cos u h 3 = a sinh v cosh v − cos u {\displaystyle {\begin{aligned}h_{1}&=h_{2}={\frac {a}{\cosh v-\cos u}}\\h_{3}&={\frac {a\sinh v}{\cosh v-\cos u}}\end{aligned}}} Bispherical coordinates ( u , v , ϕ ) ∈ ( − π , π ] × [ 0 , ∞ ) × [ 0 , 2 π ) {\displaystyle (u,v,\phi )\in (-\pi ,\pi ]\times [0,\infty )\times [0,2\pi )}
x = a sin u cos ϕ cosh v − cos u y = a sin u sin ϕ cosh v − cos u z = a sinh v cosh v − cos u {\displaystyle {\begin{aligned}x&={\frac {a\sin u\cos \phi }{\cosh v-\cos u}}\\y&={\frac {a\sin u\sin \phi }{\cosh v-\cos u}}\\z&={\frac {a\sinh v}{\cosh v-\cos u}}\end{aligned}}} h 1 = h 2 = a cosh v − cos u h 3 = a sin u cosh v − cos u {\displaystyle {\begin{aligned}h_{1}&=h_{2}={\frac {a}{\cosh v-\cos u}}\\h_{3}&={\frac {a\sin u}{\cosh v-\cos u}}\end{aligned}}} Conical coordinates ( λ , μ , ν ) ν 2 < b 2 < μ 2 < a 2 λ ∈ [ 0 , ∞ ) {\displaystyle {\begin{aligned}&(\lambda ,\mu ,\nu )\\&\nu ^{2}<b^{2}<\mu ^{2}<a^{2}\\&\lambda \in [0,\infty )\end{aligned}}}
x = λ μ ν a b y = λ a ( μ 2 − a 2 ) ( ν 2 − a 2 ) a 2 − b 2 z = λ b ( μ 2 − b 2 ) ( ν 2 − b 2 ) b 2 − a 2 {\displaystyle {\begin{aligned}x&={\frac {\lambda \mu \nu }{ab}}\\y&={\frac {\lambda }{a}}{\sqrt {\frac {(\mu ^{2}-a^{2})(\nu ^{2}-a^{2})}{a^{2}-b^{2}}}}\\z&={\frac {\lambda }{b}}{\sqrt {\frac {(\mu ^{2}-b^{2})(\nu ^{2}-b^{2})}{b^{2}-a^{2}}}}\end{aligned}}} h 1 = 1 h 2 2 = λ 2 ( μ 2 − ν 2 ) ( μ 2 − a 2 ) ( b 2 − μ 2 ) h 3 2 = λ 2 ( μ 2 − ν 2 ) ( ν 2 − a 2 ) ( ν 2 − b 2 ) {\displaystyle {\begin{aligned}h_{1}&=1\\h_{2}^{2}&={\frac {\lambda ^{2}(\mu ^{2}-\nu ^{2})}{(\mu ^{2}-a^{2})(b^{2}-\mu ^{2})}}\\h_{3}^{2}&={\frac {\lambda ^{2}(\mu ^{2}-\nu ^{2})}{(\nu ^{2}-a^{2})(\nu ^{2}-b^{2})}}\end{aligned}}}
関連項目 曲線座標(英語版) Geodetic coordinates テンソル ベクトル場 Skew coordinates 脚注 [脚注の使い方 ]
^ Weisstein, Eric W. "Orthogonal Coordinate System". mathworld.wolfram.com (英語). ^ Morse and Feshbach 1953 , Volume 1, pp. 494-523, 655-666.^ Mathematical Handbook of Formulas and Tables (3rd edition), S. Lipschutz, M.R. Spiegel, J. Liu, Schuam's Outline Series, 2009, ISBN 978-0-07-154855-7. ^ a b Vector Analysis (2nd Edition), M.R. Spiegel, S. Lipschutz, D. Spellman, Schaum’s Outlines, McGraw Hill (USA), 2009, ISBN 978-0-07-161545-7 参考文献 Korn GA and Korn TM. (1961) Mathematical Handbook for Scientists and Engineers , McGraw-Hill, pp. 164–182. Morse and Feshbach (1953). Methods of Theoretical Physics, Volume 1 . McGraw-Hill. Margenau H. and Murphy GM. (1956) The Mathematics of Physics and Chemistry , 2nd. ed., Van Nostrand, pp. 172–192. Leonid P. Lebedev and Michael J. Cloud (2003) Tensor Analysis , pp. 81 – 88. 


















![{\displaystyle {\begin{aligned}\mathbf {x} \cdot \mathbf {y} &=\left(x^{1}\mathbf {e} _{1}+x^{2}\mathbf {e} _{2}\right)\cdot \left(y_{1}\mathbf {e} ^{1}+y_{2}\mathbf {e} ^{2}\right)\\[10pt]&=\left(x^{1}h_{1}{\hat {\mathbf {e} }}_{1}+x^{2}h_{2}{\hat {\mathbf {e} }}_{2}\right)\cdot \left(y_{1}{\frac {{\hat {\mathbf {e} }}^{1}}{h_{1}}}+y_{2}{\frac {{\hat {\mathbf {e} }}^{2}}{h_{2}}}\right)=x^{1}y_{1}+x^{2}y_{2}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b967298ef8aa5d1b20f98c99698d74ed639bbcae)





















![{\displaystyle \nabla \cdot \mathbf {F} ={\frac {1}{h_{1}h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{1}}}\left(F_{1}h_{2}h_{3}\right)+{\frac {\partial }{\partial q^{2}}}\left(F_{2}h_{3}h_{1}\right)+{\frac {\partial }{\partial q^{3}}}\left(F_{3}h_{1}h_{2}\right)\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/507074e0312d74f218fab31eb2c8b8f5b1f4c006)
![{\displaystyle {\begin{aligned}\nabla \times \mathbf {F} &={\frac {{\hat {\mathbf {e} }}_{1}}{h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{2}}}\left(h_{3}F_{3}\right)-{\frac {\partial }{\partial q^{3}}}\left(h_{2}F_{2}\right)\right]+{\frac {{\hat {\mathbf {e} }}_{2}}{h_{3}h_{1}}}\left[{\frac {\partial }{\partial q^{3}}}\left(h_{1}F_{1}\right)-{\frac {\partial }{\partial q^{1}}}\left(h_{3}F_{3}\right)\right]\\[10pt]&+{\frac {{\hat {\mathbf {e} }}_{3}}{h_{1}h_{2}}}\left[{\frac {\partial }{\partial q^{1}}}\left(h_{2}F_{2}\right)-{\frac {\partial }{\partial q^{2}}}\left(h_{1}F_{1}\right)\right]={\frac {1}{h_{1}h_{2}h_{3}}}{\begin{vmatrix}h_{1}{\hat {\mathbf {e} }}_{1}&h_{2}{\hat {\mathbf {e} }}_{2}&h_{3}{\hat {\mathbf {e} }}_{3}\\{\dfrac {\partial }{\partial q^{1}}}&{\dfrac {\partial }{\partial q^{2}}}&{\dfrac {\partial }{\partial q^{3}}}\\h_{1}F_{1}&h_{2}F_{2}&h_{3}F_{3}\end{vmatrix}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6f0cf253355fd6c635882210ba8aea0ce0a2ed69)
![{\displaystyle \nabla ^{2}\phi ={\frac {1}{h_{1}h_{2}h_{3}}}\left[{\frac {\partial }{\partial q^{1}}}\left({\frac {h_{2}h_{3}}{h_{1}}}{\frac {\partial \phi }{\partial q^{1}}}\right)+{\frac {\partial }{\partial q^{2}}}\left({\frac {h_{3}h_{1}}{h_{2}}}{\frac {\partial \phi }{\partial q^{2}}}\right)+{\frac {\partial }{\partial q^{3}}}\left({\frac {h_{1}h_{2}}{h_{3}}}{\frac {\partial \phi }{\partial q^{3}}}\right)\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c36a46d097a001f5efcd7baeb71a704a4b7d12a7)






![{\displaystyle \mathbf {J} =\left[{\frac {\partial \phi }{\partial q^{1}}},{\frac {\partial \phi }{\partial q^{2}}},{\frac {\partial \phi }{\partial q^{3}}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2b3d1780fdf3a08972f06460f5741be18d7bd6fe)

![{\displaystyle \mathbf {R} =[\mathbf {e} _{1},\mathbf {e} _{2},\mathbf {e} _{3}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/28fd2e72b24c18b1b2b140ee915554865ec5c6a5)
![{\displaystyle \mathbf {S} =\mathrm {diag} ([h_{1}^{-1},h_{2}^{-1},h_{3}^{-1}]).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/974cf3b8344f1c1effd1f000b64a2ac21b104055)
![{\displaystyle (r,\theta ,\phi )\in [0,\infty )\times [0,\pi ]\times [0,2\pi )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/05f80374da8b4cc0a2a38db8d858474b585b0574)





















![{\displaystyle (\xi ,\eta ,\phi )\in [0,\infty )\times [0,\pi ]\times [0,2\pi )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/58c343b31aeed0f8843151e697f796a225a14491)


![{\displaystyle (\xi ,\eta ,\phi )\in [0,\infty )\times \left[-{\frac {\pi }{2}},{\frac {\pi }{2}}\right]\times [0,2\pi )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/93628d06c8efe1c6f60365cc5f80f615c07bca13)





![{\displaystyle (u,v,\phi )\in (-\pi ,\pi ]\times [0,\infty )\times [0,2\pi )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/000c3d0efd5294a2c0d125ea8f4a1052147fc971)













